Definition Servomotor
„Was genau ist eigentlich ein Servomotor?“. Diese Frage kann selbst Experten in Verlegenheit bringen. Im Folgenden werden daher einige Begriffe rund um den Begriff Servomotor erläutert.
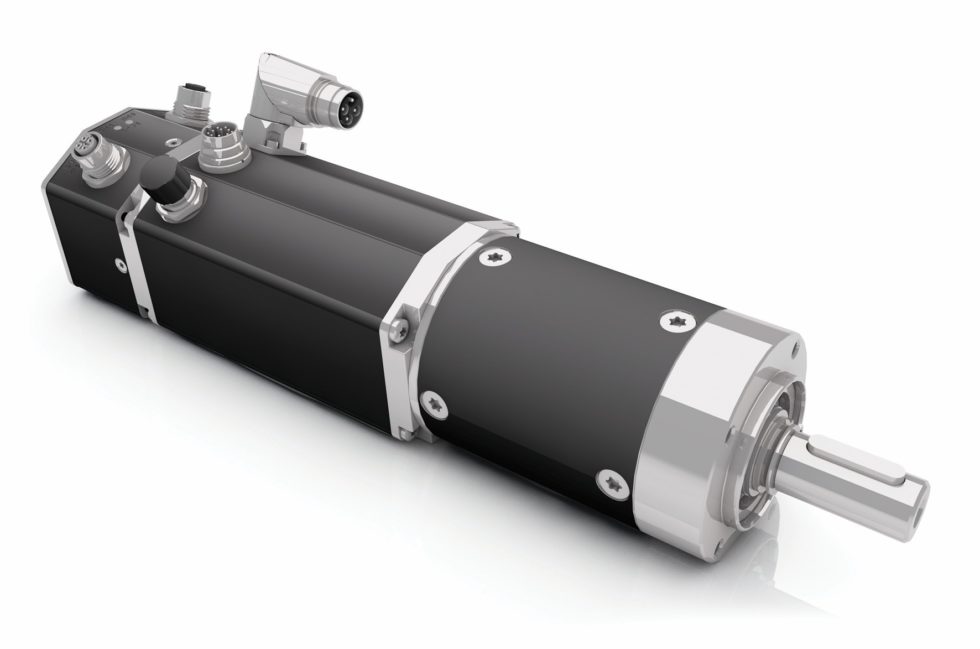
Bild Durch die vollständige Integration des Servoverstärkers sind die Komponenten perfekt aufeinander abgestimmt. Bild: Dunkermotoren
Der Begriff Servo stammt vom lateinischen „Servus“, also dem Sklaven ab [1]. Der Begriff Motor vom lateinischen „moto“ (Ich bewege) [2]. So unschön die Herkunft des Begriffes Servo ist, so passend ist doch der Begriff Servomotor für einen fleißigen Diener, der etwas bedingungslos bewegt.
Gäbe es keine weiteren Einschränkungen, wäre damit auch ein ungeregelter Bandantrieb oder ein einfacher Lüftermotor eingeschlossen. Dies ist aber im allgemeinen Verständnis nicht so. Generell wird ein Servomotor als ein Motor verstanden, der zumindest über eine Regelung verfügt beziehungsweise eine Rückmeldung über seine dreh- oder lineare Position liefern kann. Hier einige Definitionen aus Literatur und Internet:
– Ein Servomotor (Antriebstechnik) ist ein beliebiges Antriebssystem mit guter Regelbarkeit [3].
– Ein Servomotor ist ein elektrischer Motor, der strom-, drehzahl- und/oder positionsgeregelt ist. Er ermöglicht die Einstellung vorgegebener Ströme, Drehzahlen und/oder Drehwinkel [4].
– Als Servomotoren werden spezielle Elektromotoren bezeichnet, die die Kontrolle der Winkelposition ihrer Motorwelle sowie der Drehgeschwindigkeit und Beschleunigung erlauben. Sie bestehen aus einem Elektromotor, der zusätzlich mit einem Sensor zur Positionsbestimmung ausgestattet ist. Die vom Sensor ermittelte Drehposition der Motorwelle wird kontinuierlich an eine meist außerhalb des eigentlichen Motors angebrachte Regelelektronik übermittelt, den sogenannten Servoregler, der die Bewegung des Motors entsprechend einem oder mehreren einstellbaren Sollwerten – wie etwa Soll-Winkelposition der Welle oder Solldrehzahl – in einem Regelkreis regelt [5].
Der nur als Servo bezeichnete Modellbau-Servo, der ja auch eine vorgegebene Drehposition einstellt, wird in den meisten Fällen vom Begriff des Servomotors ausgeschlossen [6]. Die Bezeichnung Servomotor beschreibt damit also nicht eine bestimmte Motor-Bauart, vielmehr können Servomotoren unterschiedlichster Bauart sein. Auch elektrohydraulische oder elektropneumatische werden teilweise als Servomotoren bezeichnet (im Gegensatz zur Wikipedia-Definition). Im Folgenden werden nur noch elektrische Servomotoren behandelt.
Elektrische Servomotoren
Als Servomotoren weit verbreitet sind permanenterregte Synchronmotoren, Asynchronmotoren und bürstenbehaftete Gleichstrommotoren. Aber auch bei diesen Motoren gibt es eine Vielzahl von Begriffen, die teilweise unterschiedlich verwendet werden. Hier eine Übersicht einiger häufig verwendeter Begriffe mit Erklärung:
AC- und DC-Servomotoren
Als AC-Servomotoren werden in der Regel Motoren bezeichnet, die an Versorgungsspannungen betrieben werden, die direkt durch Gleichrichtung einer Wechselspannung (einphasig oder dreiphasig) erzeugt werden. Dies sind in der Regel Gleichspannungen ab circa 230 V bis über 600 V. Im Gegensatz dazu werden Servomotoren, die direkt an einer Kleingleichspannung bis circa 48 V betrieben werden können, als DC-Servomotoren bezeichnet [7]. Eine Aussage über die Motor-Bauart lässt diese Einteilung aber nicht zu. Permanenterregte Synchronmotoren werden nach dieser Definition sowohl als AC- als auch als DC-Synchronmotoren verwendet. Asynchronmotoren und Reluktanzmotoren werden hauptsächlich als AC-Servomotoren eingesetzt; permanent- oder fremderregte bürstenbehaftete Gleichstrommotoren eher als DC-Servomotoren [8]. Auch wenn es auf den ersten Blick nicht sinnvoll erscheint, bietet der Markt auch Schrittmotoren, die mithilfe eines Encoders eine Positionsrückführung erhalten und somit als DC-Servomotoren angeboten werden.
BLDC- und EC-Servomotoren
BLDC- (Brushless Direct Current) und EC- (Electrically Commutated) Servomotoren sind technisch gesehen permanenterregte Synchronmotoren. Oft werden diese Begriffe noch mit eher kleinen, blockkommutierten Motoren, die im Kleinspannungsbereich betrieben werden, verbunden. Mittlerweile werden die als BLDC und EC bezeichneten Motoren häufig feldorientiert angesteuert, wodurch sie in Sachen Dynamik, Geräuschverhalten und Energieeffizienz den als AC-Servo bezeichneten Motoren in nichts nachstehen (Bild).
Servomotoren, Servoverstärker und Servoantriebe
Viele Motoren, die als Servomotoren angeboten werden, können selbst nicht drehen, da sie keine integrierten Servoverstärker haben. Lediglich Servomotoren mit integriertem Servoverstärker können ohne externe Komponenten, nach Anlegen einer Versorgungsspannung, im Servobetrieb selbstständig Drehmoment, Drehzahl oder Position regeln. Dies geschieht nach Vorgaben über einen Busanschluss oder über digitale beziehungsweise analoge Eingänge. Im Sprachgebrauch hat es sich trotzdem durchgesetzt, dass Motoren, die einen externen Servoverstärker benötigen, als Servomotoren bezeichnet werden. Diese stellen sogar nach wie vor den größten Anteil der Servomotoren dar. Die Kombination aus Motor und Verstärker wird in der Regel als Servoantrieb bezeichnet.
Dynamik
Sind alle Servomotoren hochdynamisch? Viele Servomotor-Definitionen gehen auf die Dynamik nicht ein. Dennoch denkt man bei einem Servomotor an einen hochdynamischen Antrieb. Mechanische Zeitkonstanten, also die Dauer von Stillstand bis 63 % der Maximaldrehzahl ohne Last, liegen bei hochdynamischen Servomotoren im Bereich ab circa 1 bis zu wenigen Millisekunden. Erreicht wird eine hohe Dynamik durch mehrere Faktoren. Neben einer hohen Flussdichte und einer niedrigen Läufer-Massenträgheit muss der Servoverstärker auf die Motorwicklung abgestimmt sein, damit der Motor dynamisch arbeiten kann.
Motorfeedback
Resolver waren lange Zeit das Maß der Dinge bei Motor-Feedbacksystemen von Servomotoren. Mit der Digitalisierung sind magnetische und optische Systeme, die voll digitale Ausgangssignale liefern, auf dem Vormarsch. Wichtig ist, dass das Feedbacksystem hinsichtlich Robustheit, Genauigkeit und Schnittstelle zum Servoverstärker passt. Motoren mit voll integriertem Feedbacksystem und Servoverstärker haben den Vorteil, dass das Feedbacksystem gleich auf den Regler abgestimmt ist.
Literatur
[1] N. N.: Servo. In: Wikipedia, https://de.wikipedia.org/w/index.php?title=Servo&oldid=163571113, 26. Mai 2017
[2] N. N.: motor. In: Wiktionary, https://en.wiktionary.org/w/index.php?title=motor&oldid=44257611, 26. Mai 2017
[3] Wagner, M.: Technisches Wörterbuch Mechatronik/Automation deutsch-englisch. Seligenstadt: Lehrmittel-Wagner, 2011
[4] Gerke, W.: Elektrische Maschinen und Aktoren: Eine anwendungsorientierte Einführung. München: Oldenbourg Wissenschaftsverlag GmbH, 2012, S. 10
[5] N. N.: Servomotor. In: Wikipedia, https://de.wikipedia.org/w/index.php?title=Servomotor&oldid=163347715, 26. Mai 2017
[6] N. N.: Servomechanism. In: Wikipedia, https://en.wikipedia.org/w/index.php?title=Servomechanism&oldid=771646856, 26. Mai 2017
[7] Tobin, S. M.: DC Servos: Application and Design with Matlab. Boca Raton: CRC Press, 2010, S. 1
[8] Firoozian, R.: Servo Motors and Industrial Control Therory. Berlin: Springer Science & Business Media, 2008, S. 60
Michael Burger,t Produktmanager Dunkermotoren, Kontakt: Dunkermotoren GmbH, Allmendstraße 11, 79848 Bonndorf, www.dunkermotoren.de