Hexapod-System für die CFK-Bearbeitung
PI hat eine hochdynamische Ausgleichskinematik für den Flugzeugbau entwickelt. Ziel war es, die Bearbeitungs- und Versiegelungspräzision für CFK-Bauteile zu steigern.

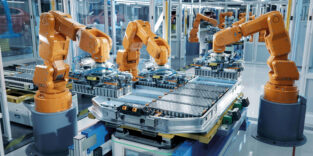
Admas-Anlage bei IFAM in Stade: Ein Knickarmroboter von Mabi-Robotic mit einem Hexapod von Physik Instrumente (PI) bearbeitet ein CFK-Bauteil.
Foto: Fraunhofer IFAM
Im Rahmen der Internationalen Luft- und Raumfahrtausstellung ILA Berlin hat Physik Instrumente (PI) sich als Partner des Forschungsprojekts LuFo VI-1: Admas (Advanced Machining and Sealing) gezeigt. Unter Federführung von Airbus habe PI seine mehr als 30-jährige Expertise aus der Entwicklung von Hexapoden in das Forschungsprojekt eingebracht. Das öffentlich vom Bundesministerium für Wirtschaft und Klimaschutz geförderte und von DLR Projektträger Luftfahrtforschung beaufsichtigte Projekt war Ende April 2024 erfolgreich abgeschlossen worden.
, einem Hexapod (mi.) und der Treiberelektronik (re.). Der Controller und der Treiber kommunizieren per Glasfaserdatenübertragung. Der Hexapod und der Treiber sind IP54-gedichtet und damit gegen CFK-Staub, Kühl- und Schmiermittel geschützt. Foto: Physik Instrumente (PI)")
Das Positioniersystem besteht aus einem Controller (li.), einem Hexapod (mi.) und der Treiberelektronik (re.). Der Controller und der Treiber kommunizieren per Glasfaserdatenübertragung. Der Hexapod und der Treiber sind IP54-gedichtet und damit gegen CFK-Staub, Kühl- und Schmiermittel geschützt.
Foto: Physik Instrumente (PI)
Im Rahmen des Verbundvorhabens entwickelte PI den Angaben zufolge den leistungsstarken Hexapod H-900K101 für eine hochdynamische Ausgleichskinematik im Flugzeugbau. Ziel war es, die Bearbeitungs- und Versiegelungspräzision für CFK-Bauteile im RTM-Herstellungsverfahren (Resin Transfer Molding) zu steigern sowie Produktionszeiten und Prozesskosten zu verringern. Der Faserverbundwerkstoff CFK trägt aufgrund seines niedrigen Gewichts bei hoher Steifigkeit entscheidend zu mehr Energieeffizienz und CO2-Einsparungen bei Flugzeugen bei.
Dynamischer Ausgleich von Prozesskräften
Den Schwerpunkt der Ausgleichskinematik bildet die Konturenbearbeitung von Wing of Tomorrow Singleaisle Flügelschalen aus CFK mittels Fräsen und Entgraten, außerdem deren nachgelagerte Versiegelung und das Einbringen von Bohrungen. Kombiniert mit einem Knickarmroboter zur groben Positionierung dient der Hexapod von PI der Feinpositionierung von Bearbeitungs- und Versiegelungswerkzeugen. „Wir haben mit dem neuen Hexapod H-900K101 ein hochdynamisches System umgesetzt, das eine Nutzlast bis 40 kg in der XY-Ebene bis 12.000 mm/s² beschleunigen kann. Das System ist in der Lage, hochfrequente Bahnabweichungen unter der Einwirkung von Prozesskräften beim Fräsen dynamisch auszugleichen“, erläutert Dr. Christian Sander, Head of Technology Development Parallel Kinematics bei PI in Karlsruhe. Das neuentwickelte Hexapod-System wurde für die spezifischen Rand- und Umgebungsbedingungen der Applikation konzipiert und ist somit insbesondere für die zeitkritischen Fertigungsprozesse mit den vorgegebenen Toleranzen der Luftfahrtindustrie optimiert.
Feinpositionierung von Werkzeugen
Zusätzlich zu dieser hohen Dynamik biete das Hexapod-System eine Glasfaserdatenübertragung zwischen Hexapod-Controller und Treiberelektronik. Darüber hinaus zeichne sich das System durch eine sehr kurze Latenzzeit bei Verwendung der Ethercat-Schnittstelle sowie gemäß Schutzklasse IP54 gedichtete Komponenten aus. Mittels Glasfaserdatenübertragung lasse sich der Hexapod-Controller ohne Beeinträchtigung der Schnittstellenvielfalt komfortabel im Schaltschrank außerhalb der Bearbeitungszelle platzieren und könne aus über 100 m Entfernung die Treiberelektronik ansteuern. Für die Ethercat-Schnittstelle wurde eine tiefe Integration der Ethercat-Funktionalität in die Controller- und Treiberarchitektur von PI realisiert. Im komplexen Regelkreis für den Ausgleich von Bahnabweichungen zwischen Kantenerkennungssensorik, Knickarmroboter und Hexapod trage das Positioniersystem von PI damit nur eine minimale Totzeit bei. Die Reaktionszeit im Ethercat-Regelkreis zwischen Positionsabfrage- und Positionsvorgabe des Hexapods beträgt 1,5 ms.
Zuletzt wurde im Projekt Admas LuFo untersucht, inwieweit der Einsatz von Beschleunigungssensoren zur Verschleißdetektion bei Einzelbeinen des Hexapods im Rahmen des Condition-Monitorings zielführend ist. Das Frequenzspektrum der Schwingungen innerhalb eines Einzelbeins kann dabei charakteristischen Eigenfrequenzen von Antriebskomponenten zugeordnet werden und somit als Indikator für Systemveränderungen dienen.
Modulare Hexapod-Systeme
Hexapoden bieten sechs Freiheitsgrade der Bewegung auf kompaktestem Raum. Für industrielle Anwendungen sind Kombinationen aus absolut messenden Positionssensoren, Software und Motion Controllern verfügbar, mit denen sich auch komplexe Bewegungsprofile kommandieren lassen. Alle Antriebstechniken sind individuell anpassbar.
Präzisionshexapoden von PI sind den Angaben zufolge in der Standardausführung für Lasten von 1 bis 250 kg und Wiederholgenauigkeiten bis zu ±0,06 µm verfügbar. Kundenspezifische Präzisionshexapoden können Lasten von mehr als 2.000 kg tragen. Hexapoden von PI kommen weltweit in der Siliziumphotonik, Automatisierung, Medizintechnik sowie Astronomie und Forschung zum Einsatz. Je nach Anforderung sind sie für Umgebungsbedingungen wie IP54, Labor, Reinraum, Hochvakuum und Ultrahochvakuum spezifizierbar.