Ein von nachgiebigen Mechanismen inspirierter Ansatz zur Konzeptionierung von additiv gefertigten Soft Robots
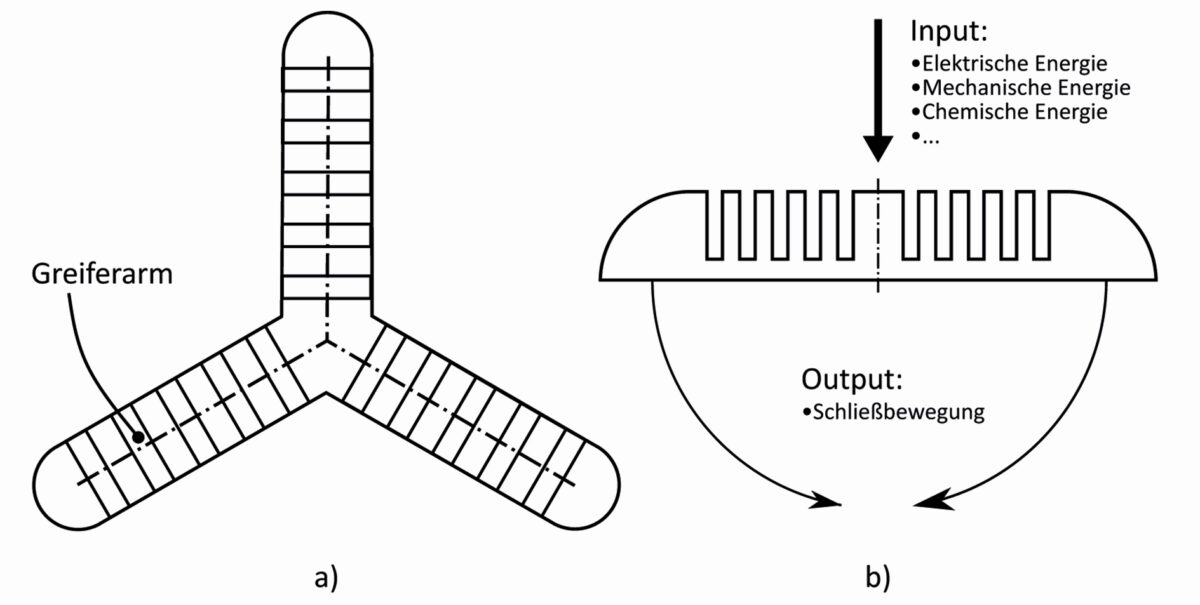
Bild 1: Schematische Darstellung eines Dreiarm-Greifers: a) Draufsicht b) Seitenansicht. Grafik: KTmfk
DOI 10.37544/0720-5953-2023-04-66
INHALT Die ausgeprägten Designfreiheiten durch die additive Fertigung finden besonders in der Gestaltung von Soft Robots Anwendung [1]. Unter Soft Robotic wird ein junges und schnell wachsendes Forschungsgebiet verstanden, welches durch variable und steuerbare Nachgiebigkeiten innerhalb der Strukturen Lösungen für verschiedene Bewegungsprobleme finden möchte [2]. Die Bauteile werden dabei häufig als Vorabmodell aus Gründen der Funktionsintegration additiv hergestellt. Durch die Funktionsintegration können z. B. bewegliche Baugruppen durch ein Einzelbauteil höherer Komplexität substituiert und somit Wirkungsgrade verbessert, Massen reduziert und Montagezeiten verkürzt werden. Dies entspricht in den Zielen den Nachgiebigen Mechanismen, welche jedoch aktuell noch nicht im Kontext von Soft-Robotics betrachtet werden und deshalb auch keine Konzeptions- oder Designvorschriften für diesen Anwendungsfall existieren. Im vorliegenden Beitrag wird ein Ansatz zur Konzeptionierung von Soft Robots vorgestellt, welche auf einer Kombination aus der Konstruktionsmethodik nach Pahl/Beitz und einer Auslegungsmethodik für nachgiebige Mechanismen basiert. Hierbei wurden verschiedene additiv gefertigte Soft Robotic Greiferkonzepte verglichen und parallel unterschiedliche Aktivierungsformen in der Soft Robotic untersucht. Die Soft Robotic Greifer können zur Manipulation von Gegenständen, beispielsweise in der Lebensmittelindustrie, verwendet werden.
A compliant mechanism inspired approach for the design process of additive manufactured soft robots
ABSTRACT The distinctive design freedoms provided by additive manufacturing are particularly applied in the design of soft robots [1]. Soft robotics is a young and rapidly growing field of research which aims to find solutions for various motion problems by means of variable and controllable compliance within the structures [2]. The components are often produced additively as a preliminary model for reasons of functional integration. Functional integration can be used, for example, to replace moving assemblies with a single component of higher complexity, thus improving efficiency, reducing mass and shortening assembly times. This corresponds to the goals of compliant mechanisms, which are not yet considered in the context of soft robotics and therefore no concept or design guidelines exist for this specific application. In this paper an approach for the conceptual design of soft robots is presented, which is based on a combination of the design methodology according to Pahl/Beitz and a design methodology for compliant mechanisms. Different additively manufactured soft robotic gripper concepts were compared and different forms of activation in the soft robot were investigated in parallel. The soft robotic grippers can then be used for manipulating objects, for example in the food industry.
KONSTRUKTION (2023) NR. 04