Die Chance die Sicherheit zu erhöhen und gleichzeitig den Verkehrslärm zu reduzieren
Zusammenfassung Im städtischen Umfeld sind die Bewohner permanent einem erhöhten Lärmpegel ausgesetzt, der meist von Verkehrslärm dominiert wird. Die Elektrifizierung von Fahrzeugen könnte den Verkehrslärm in Stadtzentren beeinflussen. Verkehrsteilnehmer wie Fußgänger und Radfahrer sind teilweise auf Geräusche von Fahrzeugen als Sicherheitsaspekt angewiesen. Die Detektierbarkeit von Fahrzeuggeräuschen ist aus Sicherheitsgründen ein wichtiges Merkmal. Das Ziel dieser Arbeit ist es, die Detektierbarkeit und die Lästigkeit verschiedener Elektrofahrzeuggeräusche für eine konstante Geschwindigkeit und einer Vorbeifahrtsituation zu ermitteln. Zu diesem Zweck wurden die Unterschiede in der wahrgenommenen Lästigkeit und den Detektionszeiten mit Wahrnehmungsstudien untersucht. Dafür wurden neun Varianten von synthetischen Elektrofahrzeuggeräuschen verwendet. Die Ergebnisse zeigen, dass nur eine geringe Änderung eines Reizes, wie z.B. eine Frequenzänderung, die Detektionszeit enorm beeinflusst.

Quelle: Panther Media/Anita Gerhard
Der Prozess der Fahrzeugelektrifizierung ist auf dem Vormarsch. Vor dem Hintergrund des zunehmenden Einsatzes von Elektrofahrzeugen im Straßenverkehr, besteht ein wachsender Bedarf an Bestimmung der Wahrnehmbarkeit von Fahrzeugaußengeräuschen, da sich Elektrofahrzeuge bis zu einer Geschwindigkeit von 20 km/h nahezu lautlos bewegen. Diese geringe Schallemission birgt ein erhöhtes Gefahrenpotenzial, besonders für schwächere Verkehrsteilnehmer. Diesbezüglich gibt es die Verordnung EU VO 540/2014, welche ein Geräusch bei Geschwindigkeiten größer 0 km/h bis kleiner gleich 20 km/h von neu typgenehmigten Elektrofahrzeugen ab 2019 vorschreibt [1]. Ab diesem Zeitpunkt sollen elektrisch angetriebene Fahrzeuge mit Hilfe des Acoustic Vehicle Alerting System (AVAS) besser wahrnehmbar sein, ohne das Geräuschniveau von konventionell angetriebenen Fahrzeugen zu überschreiten.
Um Kraftfahrzeuge und ihren Fahrzustand erkennen zu können, benötigt ein Fußgänger sensorisch vermittelte Informationen. Damit wird klar, dass die Geräusche so gestaltet werden müssen, dass Fußgänger akustische Informationen erhalten, die ein Fahrzeug als solches rechtzeitig detektieren. Diese Informationen können Fahrtrichtung, Geschwindigkeit, Betriebszustand (Beschleunigung, Verzögerung) sein.
Auf der anderen Seite stellt Straßenverkehrslärm eine der lästigsten Formen von Umweltlärm dar. Laut einer Studie des Umweltbundesamtes fühlt sich mehr als die Hälfte der deutschen Bevölkerung von Verkehrsgeräuschen gestört oder sogar belästigt [2]. Dabei stellt Lärm einen Stressfaktor dar, der sich auch negativ auf die Gesundheit des Menschen auswirken kann. In Anbetracht dessen ist es wichtig, Geräusche zu erzeugen, die nicht störend sind.
Die konträren Anforderungen verdeutlichen, dass die Generierung von synthetischen Elektrofahrzeuggeräuschen eine ganzheitliche und anspruchsvolle Aufgabe ist, die möglichst alle Aspekte einbezieht.
Anforderungen an ein Geräusch
Gesetzliche Anforderungen
In der am 16. April 2014 verabschiedeten EU-Verordnung Nr. 540/2014 [1] ist vorgeschrieben, dass bei allen neu zugelassen elektrisch angetriebenen Fahrzeugen ab dem 1. Juli 2019 ein akustisches Fahrzeug-Warnsystems (Acoustic Vehicle Alerting System – AVAS) eingebaut werden muss. Ab Juli 2021 müssen alle elektrisch angetriebenen Neufahrzeuge mit einem AVAS ausgestattet sein. Die Verordnung fordert, dass ein Geräusch bei Geschwindigkeiten größer 0 km/h bis kleiner gleich 20 km/h abgestrahlt werden soll. Die Wirtschaftskommission der Vereinigten Nationen für Europa (United Nations Economic Commission for Europe – UNECE) legt in der Regelung R 138 [3] detaillierte Anforderungen fest. Die UNECE beschäftigt das als Arbeitsgruppe 29 (WP.29) bekannte Weltforum zur Harmonisierung der Fahrzeugregelungen (World Forum for Harmonization of Vehicle Regulations). Diese Arbeitsgruppe erstellt international vereinbarte, einheitliche technische Vorschriften für Kraftfahrzeuge sowie für deren Teile. Zugehörig zur WP.29 erarbeitet die Arbeitsgruppe für Lärm (-reduzierung) (Working Party On Noise – GRB) Regulierungsvorschläge zur Reduzierung von (Verkehrs-) Lärm. Die aus Experten bestehende Gruppe ermittelt auf Basis von Forschungen und Analysen unter anderem Lärmanforderungen an Fahrzeuge. Die Arbeit der GRB ist vollkommen transparent. Alle Arbeitsdokumente und Berichte werden öffentlich zugänglich bereitgestellt. Der aktuelle Vorschlag definiert A-bewertete Mindestschalldruckpegel für ein Warnsignal für die Geschwindigkeiten 10 km/h und 20 km/h sowie für die Rückwärtsfahrt, welche unter Anwendung einer definierten Messvorschrift erreicht werden müssen. Diese Anforderungen sind in Bild 1 dargestellt.
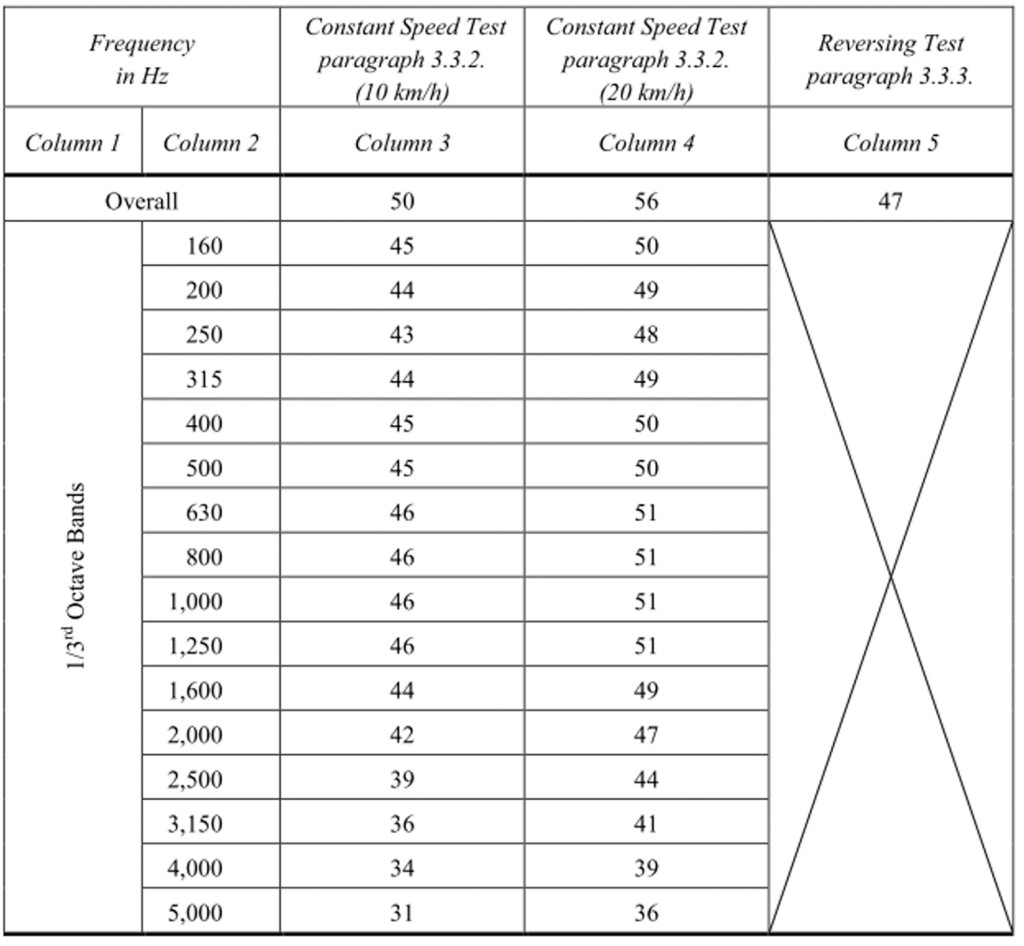
Bild 1. Minimalpegelanforderungen an ein Zusatzgeräusch als Maximalpegel bei Vorbeifahrt an einem Messmikrofon in 2 m Abstand vom Fahrzeugweg.
Foto: TU Dresden
Da ab einer Geschwindigkeit von 20 km/h die Rollgeräusche dominieren, ist ein Zusatzgeräusch in höheren Geschwindigkeitsbereichen nicht notwendig und daher in dieser Regelung auch nicht vorgesehen. Die gesetzlichen Regularien besagen, dass mindestens zwei Terzbänder zwischen 160 und 5000 Hz verwendet werden und jeweilige Minimalpegel eingehalten werden müssen. Dabei muss mindestens eines dieser Bänder unter oder innerhalb des 1600 Hz Terzbandes liegen. Der maximale Gesamtschalldruckpegel von 75 dB (A) gemessen in einer Entfernung von 2 m darf nicht überschritten werden und entspricht einem Gesamtschalldruckpegel von 66 dB (A) gemessen in einer Entfernung von 7,5 m. Die Regelung sieht momentan keine verpflichtende Anforderung an ein Stationär-Geräusch vor.
Ein sogenannter Frequency Shift soll genutzt werden, um die Beschleunigung und die Verzögerung zu vermitteln. Die Absicht der Frequenzverschiebung besteht darin, die Verkehrsteilnehmer akustisch über die Änderung der Fahrzeuggeschwindigkeit zu informieren. Dabei sollte mindestens ein Ton innerhalb des zulässigen Frequenzbereichs (vgl. Bild 1) um durchschnittlich mindestens 0,8 % pro 1 km/h im Geschwindigkeitsbereich von 5 km/h bis 20 km/h verändert werden. Falls mehr als eine Frequenz verschoben wird, ist es ausreichend, wenn nur eine Frequenz diese Anforderung erfüllt.
Sicherheitsaspekt
Vorangegangene Studien zeigen [4, 5], dass Elektrofahrzeuge ohne ein Zusatzgeräusch unter Umständen nicht rechtzeitig detektierbar sind, um einen Unfall zu vermeiden. Dies zeigt noch einmal auf, dass sie ein zusätzliches Geräusch als Sicherheitsaspekt benötigen.
Durch Wahrnehmungsuntersuchungen kann ein Informationszuwachs geschaffen werden, welcher die Gestaltung der Fahrzeugaußengeräusche erleichtert.
Um die Detektionsfähigkeit synthetischer Außengeräusche von Elektrofahrzeuggeräuschen zu überprüfen, können z.B. Probandenversuche angewendet werden. Bei diesen Hörversuchen beantworten Probanden z.B. die Frage: „Wann bemerken Sie das sich nähernde Fahrzeug?“ und antworten durch die Betätigung eines Knopfes. Dabei ist essenziell in welcher Entfernung die Fahrzeuggeräusche detektiert werden können. Nach Kerber [6] kann der sogenannte kritische Abstand, der die nötige Entfernung zwischen Fahrzeug und Fußgänger beschreibt, bei dem es möglich ist, einen Unfall zu vermeiden, mit folgender Formel beschrieben werden:
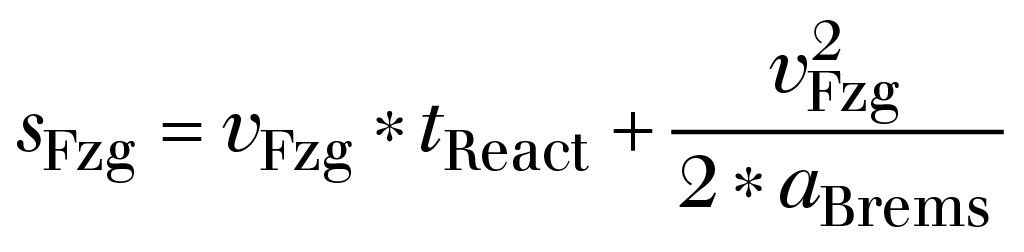
Dabei beschreibt SFzg den zurückgelegten Weg, vFzg die Fahrzeuggeschwindigkeit, aBrems ist die Bremsverzögerung die üblicherweise mit 8 m/s² angenommen werden kann. Des Weiteren beschreibt treact die Reaktionszeiten, welche nach Green [7] mit 0,7 s für konzentrierte und 1,5 s für unkonzentrierte Verkehrsteilnehmer angenommen werden kann.
Da die Wahrnehmbarkeit eines Geräusches durch Hintergrundgeräusche beeinflusst wird, ist es für die Überprüfung der Detektion ebenfalls wichtig, einen geeigneten Markierer zu verwenden.
In einigen früheren Studien, die am Institut für Akustik und Haptik der Technischen Universität Dresden erfolgten, wurden sowohl die Notwendigkeit synthetisch erzeugter Warngeräusche für leise Fahrzeuge untersucht, als auch deren Struktur und die resultierende auditive Wahrnehmung genauer betrachtet [4, 5, 8, 9, 10, 11, 12].
Akzeptanz
Die Akzeptanz eines Warngeräusches für elektrische angetriebene Fahrzeuge setzt sich aus dem Komfort im Fahrzeuginnenraum, der Geräuschbelastung sowie der Glaubwürdigkeit des Geräusches zusammen. Außenstehende (z.B. Fußgänger, Fahrradfahrer und Anwohner) sowie Insassen eines Elektrofahrzeuges sollten das abgestrahlte Zusatzgeräusch als etwas Positives und Notwendiges betrachten. Darüber hinaus muss es vom Fahrzeug untrennbar sein [13].
Komfort im Fahrzeuginnenraum
Der Komfort im Fahrzeuginnenraum entspricht der positiven Wahrnehmung des Geräusches durch Fahrgäste bzw. Fahrer.
Geringe Geräuschbelastung
Im heutigen städtischen Umfeld sind die Bewohner dauerhaft erhöhten Lärmpegeln ausgesetzt, die meist von Verkehrslärm dominiert werden. Der Prozess der Elektrifizierung von Fahrzeugen könnte den Verkehrslärm in den Stadtzentren verändern. Durch die zusätzlich erzeugten Fahrzeuggeräusche erhöht sich die Geräuschbelastung von Mensch und Umwelt. Da eine unnötige Erhöhung der Gesamtgeräuschbelastung in jedem Fall zu vermeiden ist, sollte bei der Gestaltung der Warngeräusche Fingerspitzengefühl bewiesen werden.
Auch die Ästhetik eines Geräusches spielt bei der Generierung eine besondere Rolle. Die Ästhetik ist auf die psychoakustischen Parameter Geräuschqualität und Lästigkeit zurückzuführen. Ein ästhetisches Warngeräusch für Elektrofahrzeuge sollte somit qualitativ hochwertig und keinesfalls lästig sein.
Die Wahrnehmung von Fahrzeugen besteht stets aus visuellen und akustischen Komponenten und wird von diesen beeinflusst. So kann ein sportliches Fahrzeuggeräusch bei einem Kleinwagen als unpassend empfunden und qualitativ minderwertiger wahrgenommen werden.
Die Lästigkeit ist eine komplexe psychoakustische Größe. Zwicker beschreibt diese als abhängig von der Lautheit N, der Schärfe S und der Schwankungsstärke F bzw. der Rauigkeit R [14]. Die Qualität eines Geräusches lässt sich nach Fastl über die klassischen psychoakustischen Methoden Paarvergleich, Rangordnung, Semantisches Differenzial, Kategorial-Skalierung sowie Größenschätzungsverfahren ermitteln [15].
Bisherige Ergebnisse
Detektion
Die Detektionsfähigkeit stellt einen der wichtigsten Sicherheitsaspekte eines Elektrofahrzeuggeräusches in Bezug auf die mögliche Vermeidung eines Unfalls dar.
Bei der Wahrnehmung von Verbrennerfahrzeugen kann eine rechtzeitige Detektion auf tieffrequente zeitvariante Geräuschanteile entsprechend der Motorordnungen im Frequenzbereich zwischen 50 Hz und 300 Hz, zurückgeführt werden [8]. Die Implementierung von mindestens drei tieffrequenten Motorordnungen mit einem Abstand von 30 Hz zueinander (z. B. 240 Hz, 270 Hz, 300 Hz) in ein entsprechendes Warngeräusch führt zu einer klaren Fahrzeugidentifikation. Grundsätzlich sind tieffrequente Geräuschkomponenten unter 1,6 kHz, wie es die Regelung mittlerweile empfiehlt, für ein Warngeräusch zur sicheren Detektion ausreichend [9, 10].
Im Detektionsversuch des eVADER-Projekts (Electric Vehicle Alert for Detection and Emergency Response) [16] wurden reine Sinustönen als mögliche Warngeräusche genutzt, welche sich stets aus einem Grundton mit einer Frequenz von 300 Hz und verschiedenen Anzahlen von dessen Harmonischen zusammensetzten. Eine Pegelerhöhung von 2 dB gegenüber dem alleinigen Fahrgeräusch eines Elektrofahrzeuges ist demnach ausreichend, um das Detektionsniveau eines sich nähernden Verbrenner-(Diesel-)Fahrzeuges zu erreichen. Eine Amplitudenmodulation von reinen Sinustönen führt in Anwesenheit verschiedener Hintergrundgeräusche zu einer besseren Detektionsfähigkeit [17, 18]. Eine niedrige Modulationsfrequenz (8 Hz) und die Kombination aus periodischen und nicht periodischen Modulationen zeigen ebenfalls einen positiven Einfluss auf die Detektionsfähigkeit [19]. Ein bezüglich der Detektion optimales Warngeräusch besteht demnach aus wenigen, bspw. drei Harmonischen, die keine Frequenz-, aber eine maximale Amplituden-Modulation aufweisen [20, 21]. In diesem Projekt konnten zwischen normalsehenden und sehbeeinträchtigten Probanden keine signifikanten Wahrnehmungsunterschiede nachgewiesen werden [20, 17].
Hastings nutzt Moores Modell zur partiellen Lautheit für die Vorhersage der Erkennungsniveaus von reinen Sinustönen und Schmalbandrauschen [22]. Mit einem Ton-zu-Rausch-Abstand (tone-to-noise-ratio – TNR) von 9 dB implementiert er darüber hinaus reine Sinustöne über Schmalbandrauschen. Die Frequenzen der Geräuschkomponenten resultieren aus den 1/3-Oktavbändern und orientieren sich an den gesetzlichen Regularien [23, 3]. Die Nutzung nicht benachbarter sowie mehrerer Bänder verbessert die Detektionsfähigkeit, wobei die Verwendung von mehr als vier 1/3-Oktavbändern keine signifikanten Verbesserungen mehr erzielen kann [24].
Die Detektionsfähigkeit eines Warngeräusches wird darüber hinaus stets vom Schalldruckpegel der anwesenden Hintergrundgeräusche beeinflusst [5, 25]. Während in verkehrsberuhigten Zonen und Wohngebietsstraßen Warngeräusche gut detektierbar sein können, sind diese auf oder in der Nähe viel befahrener, innerstädtischer Straßen eventuell schlecht bzw. gar nicht mehr wahrzunehmen [21]. Eine Pegelerhöhung des Hintergrundgeräusches von 10 dB oder mehr führt demnach von einer rechtzeitigen zu einer nicht mehr rechtzeitigen Detektionsfähigkeit bei gleichbleibenden Pegel der Warngeräusche. Im Zuge dieser Erkenntnis entstand der Vorschlag einer adaptiven Anpassung des Warnsignalpegels an das Hintergrundgeräusch [26, 25].
Am Lehrstuhl für Akustik und Haptik der Technischen Universität Dresden wurden mittels eigens entwickelten Programms mit Pure Data neun verschiedene Geräusche erstellt, welche die gesetzlichen Anforderungen an das Elektrofahrzeuggeräusch erfüllen.
Alle neun Stimuli (vgl. Bild 2) wurden auf Basis von drei tieffrequenten tonalen Komponenten generiert und erhielten ein zusätzliches Schmalbandrauschen im selben Frequenzbereich.
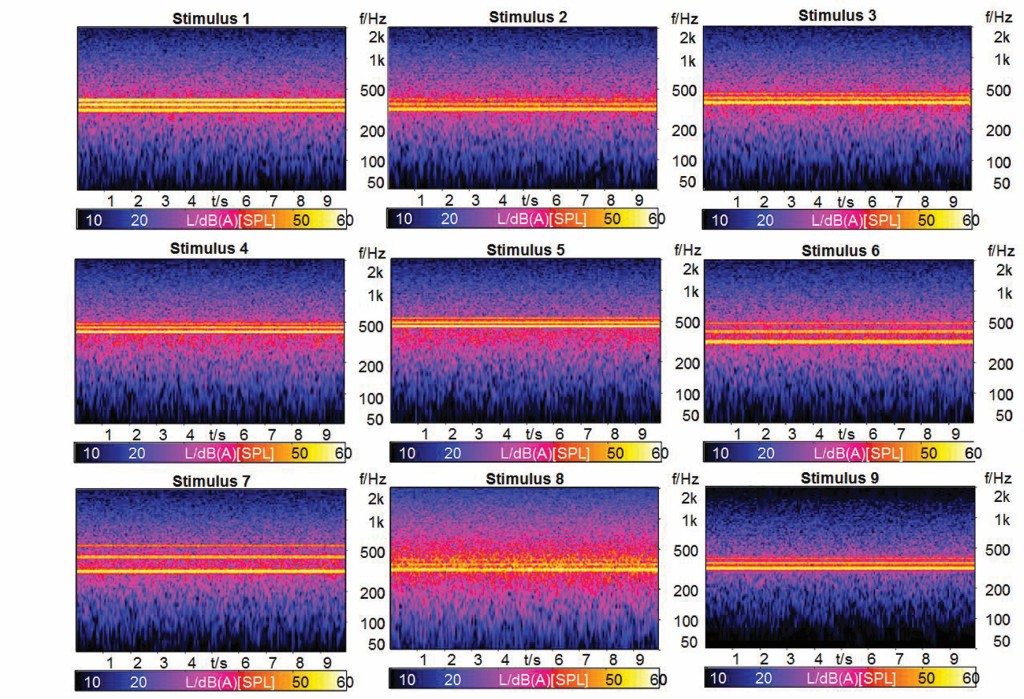
Bild 2. Spektrogramme der verwendeten Stimuli.
Foto: TU Dresden
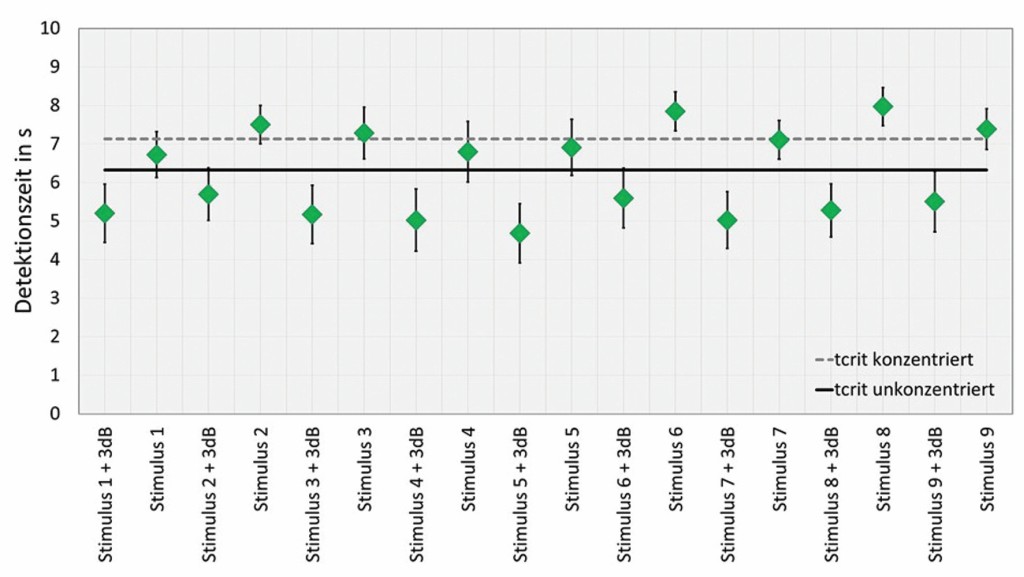
Bild 3. Ergebnisse der Geräuschdetektionszeiten für alle 18 Stimuli.
Es zeigt sich deutlich, dass alle Geräusche mit dem 3 dB lauteren Pegel früher detektiert werden und der Median unterhalb oder auf der kritischen Detektionszeit für unkonzentrierte Verkehrsteilnehmer liegen. Das bedeutet, dass diese Geräusche im Mittel rechtzeitig detektierbar sind. Aber auch hier zeigen sich je nach Geräusch Unterschiede. So wurde der Stimulus 5 im Mittel am frühesten detektiert. Das bedeutet, dass die Detektion verbessert ist, wenn die tonalen Anteile um 500 Hz liegen. Auch die Bewertung von Stimulus 7 zeigt eine gute Detektion. Hier bestätigt sich das Phänomen welches Hastings beschrieben hat, dass die Detektion verbessert wird, wenn der Ordnungsabstand größer ist. Es zeigten sich keine signifikanten Unterschiede zwischen den Probanden.
Lästigkeit
Eine geringe Lästigkeit eines Fahrzeuggeräusches spielt für die Akzeptanz des Geräusches eine wesentliche Rolle.
Auch die Lästigkeit von künstlich erzeugten Elektrofahrzeuggeräuschen wurde bereits bewertet. So zeigt sich z.B., dass eine Erhöhung des Ordnungsabstandes eine höhere Lästigkeitsempfindung nach sich zieht [11, 12]. Ein stark tonaler Charakter, wie er durch die ausschließliche Verwendung reiner Sinustöne entsteht, kann durch die gleichzeitige Nutzung von Schmalbandrauschen beeinflusst werden und führt zu einem weniger lästigen Schallsignal [11, 12].
Eine Amplitudenmodulation führt ebenfalls zu einer höheren Lästigkeitsbewertung [17, 18]. Weshalb in Bezug auf die Lästigkeit eine Vermeidung jeglicher Modulationen vorteilhaft ist [18].
Die Lästigkeit möglicher Warngeräusche im Straßenverkehr wird maßgeblich von der Anzahl der anwesenden Fahrzeuge, die dieses Geräusch abstrahlen, beeinflusst. Die Superposition mehrerer, geringfügig lästiger Einzelgeräusche kann einen sehr lästigen Gesamteindruck hervorrufen [5]. Verschiedene Fahrzeuggeschwindigkeiten in Kombination mit Frequenzvariationen erzeugen aufgrund der Beschleunigungen oder Verzögerungen einzelner Fahrzeuge Disharmonische, die unabhängig von der Signallautheit als lästig empfunden werden. Sie verschlechtern darüber hinaus die Detektionsfähigkeit [27].
Die neun am frühesten detektierbaren Geräusche wurden von den Probanden ebenfalls hinsichtlich ihrer Lästigkeit bewertet. Dies geschah mit Hilfe einer Kategorienskalierung mit verbalen Ankern. Die Ergebnisse sind in Bild 4 dargestellt.
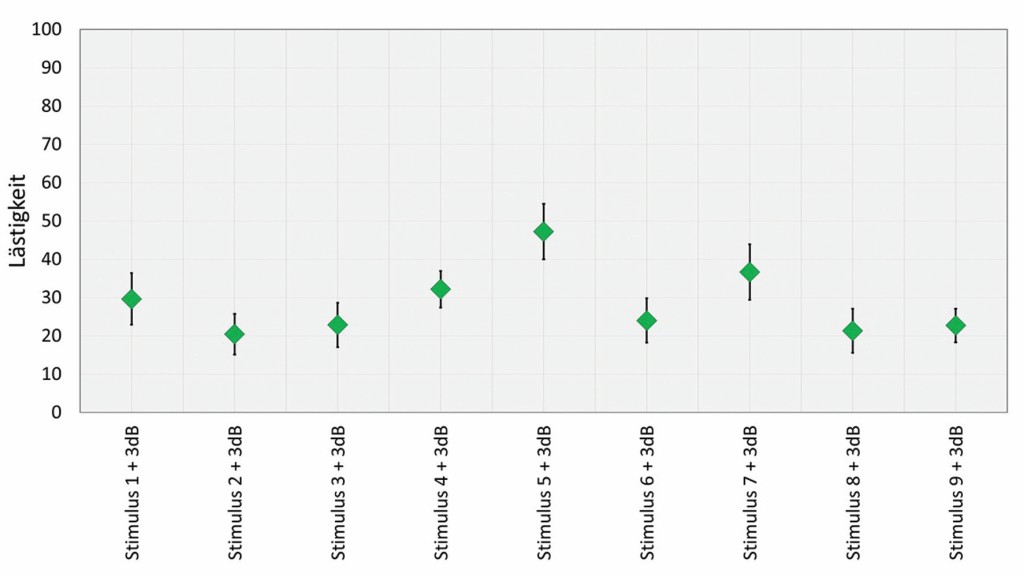
Bild 4. Ergebnisse der Lästigkeitsbewertungen für die neun rechtzeitig detektierbaren Stimuli.
Foto: TU Dresden
Anhand dieser Ergebnisse zeigt sich, dass Stimulus 5, welcher am frühesten detektierbar ist, am meisten als lästig bewertet wurde. Dies entspricht ebenfalls der Literatur, dass höher frequente Geräusche tendenziell lästiger sind. Auch die Erhöhung des Ordnungsabstandes führt zu einem größeren Lästigkeitsempfinden. Generell zeigt sich aber, dass alle neun verwendeten Geräusche solitär als eher wenig lästig bewertet werden.
Zusammenfassung
Am Beispiel von neun synthetisch generierten Stimuli wurden sowohl Detektionsversuche zur Sicherstellung des Sicherheitsaspektes als auch Lästigkeitsuntersuchungen bezogen auf die Ästhetik durchgeführt. Die hier dargestellten Ergebnisse bestätigen frühere Ergebnisse und zeigen, dass die Minimalanforderung nicht ausreicht, um ein Fahrzeug in einer typischen Verkehrssituation mit einem Hintergrundgeräusch (z.B. Bundesstraße in 50 m Entfernung) rechtzeitig zu detektieren. Werden die Pegel um 3 dB erhöht, werden alle neun Stimuli im Mittel rechtzeitig detektiert. Es zeigt sich zudem, dass höhere Frequenzen besser detektiert werden können. Stimuli, bei denen der Ordnungsabstand größer ist, können ebenfalls besser detektiert werden, werden aber auch als lästiger empfunden. Bezüglich der Lästigkeit zeigt sich, dass alle neun Varianten, bestehend aus drei Einzeltönen über Schmalbandrauschen generell als wenig lästig eingestuft werden.
Es stellt sich dar, dass es wichtig ist, einen Kompromiss zwischen guter Detektierbarkeit und Lästigkeit zu finden. So wird beispielsweise Stimulus 8 rechtzeitig detektiert und von den Probanden als wenig lästig bewertet.
[1] Verordnung (EU) Nr. 540/2014 des Europäischen Parlaments und des Rates vom 16. April 2014 über den Geräuschpegel von Kraftfahrzeugen und von Austauschschalldämpferanlagen sowie zur Änderung der Richtlinie 2007/46/EG und zur Aufhebung der Richtlinie 70/157/EWG Text von Bedeutung für den EWR.
[2] Umweltbundesamt, Thema Lärmbelästigung, http://www.umweltbundesamt.de /themen/verkehr-laerm/laermwirkung/laermbelaestigung, Online Ressource, (Stand: 20.12.2017)
[3] United Nations Economic Commission for Europe (UNECE) Regulation 138: „Uniform provisions concerning the approval of Quiet Road Transport Vehicles with regard to their reduced audibility(QRTV)“ https://www.unece.org/fileadmin/DAM/trans/main/wp29/wp29regs/2016/R138e.pdf (last access: 06.April 2017).
[4] Altinsoy, M. E.: The detectability of conventional, hybrid and electric vehicle sounds by sighted, visually impaired and blind pedestrians. Internoise 2013, Innsbruck, Austria.
[5] Steinbach, L.; Altinsoy, M. E.: Lästigkeitsbewertung von Verkehrssituationen im Hinblick auf unterschiedliche Antriebskonzepte. DAGA 2016, Aachen, Germany.
[6] Kerber, S.: Bedeutung des Fahrzeugaußengeräusches im urbanen Verkehr für die Interaktion Fußgänger-Fahrzeug. ATZ – Automobiltechnische Zeitschrift (2006), 8. Ausgabe .
[7] Green, M.: How long does it take to stop? Methodological analysis of driver perception-brake times. In: Transportation human factors, (2000), 2. Ausgabe S. 195-216.
[8] Altinsoy, M. E.: Auditive Wahrnehmung und Beurteilung von instationären Fahrzeugaußengeräuschen. In: Lärmbekämpfung, (2014), Bd. 9 Nr. 2, S. 64-71.
[9] Altinsoy, M. E. et al.: Investigations on the Detectability of Synthesized Eletric Vehicle Sounds. Vehicle Operation: Approaching at 10 km/h. Forum Acousticum, (2014), Krakow, Poland.
[10] Altinsoy, M.E.; Landgraf, J.: Perceptibility of Vehicle Exterior Sounds. Balance between Information and Noise. In: ATZ Worldwide, (2014), Jg. 116 Nr. 9, S. 60-65.
[11] Steinbach, L.; Altinsoy, M. E.; Rosenkranz, R.: Elektromobilität: Angepasste Geschwindigkeits-Pegel-Skalierung erhöht die Sicherheit. DAGA 2017, Kiel, Germany.
[12] Steinbach, L.; Altinsoy, M. E.; Rosenkranz, R.: Evaluation of Multiple Electric Vehicle Sources and New Concepts Regarding Speed Dependency. (2017), SAE Technical Paper 2017-01-1763.
[13] Vegt, E.: Designing Sound for Quiet Cars. SAE Technical Paper 2016-01-1839
[14] Zwicker, E.; Fastl, H.: Psychoacoustics. Facts and Models (3. Auflage). Berlin: Springer Verlag, (2007)
[15] : Psychoacoustics and sound quality. In: Blauert, J. [Hrsg.]: Communication Acoustics. S. 139-162. Springer Verlag: Berlin, Heidelberg 2005.
[16] Technische Universität Darmstadt: The eVADER project [online], (2017), Verfügbar unter: http://evader-project.eu/ (07.08.2017).
[17] Robart, R. et al.: eVADER: A Perceptual Approach to Finding Minimum Warning Sounds Requirements for Quiet Cars. DAGA, (2013), Merano, Italy.
[18] Parizet, E. et al.: Warning Sounds for Electric Vehicles. Fisita World Automotive Congress Maastricht, (2014), Netherlands.
[19] Yasui, N.; Muira, M.: Effect of amplitude envelope on detectability of warning sound for quiet vehicle. Inter-Noise Hamburg, (2016), Germany.
[20] Parizet, E.; Ellermeier, W.; Robart, R.: Auditory warnings for electric vehicles: Detectability in normal-vision and visually-impaired listeners. In: Applied Acoustics, (2014), Jg. 86, S. 50-58.
[21] Poveda-Martínez, P. et al.: Study of the effectiveness of electric vehicle warning sounds depending on the urban environment. In: Applied Acoustics, (2017), Jg. 116, S. 317-328.
[22] Moore, B. C. J.; Glasberg, B. R.; Baer, T.: A Model for the Prediction of Thresholds, Loudness and Partial Loudness. In: Journal of the Audio Engineering Society, (1997), Jg. 45 Nr. 4, S. 224-240.
[23] Department of Transportation (DOT) – National Highway Traffic Safety Administration (NHTSA): Federal Motor Vehicle Safety Standards; Minimum Sound Requirements for Hybrid and Electric Vehicles. 49 CFR Parts 571 and 585 [Docket No. HTSA-2016-0125], (2016).
[24] Hastings, A.; McInnis, C.: Detectibility of Alert Signals for Hybrid and Electric Vehicles: Acoustic Modeling and Human Subjects Experiments Washington DC, (2015), DOT/NHTSA.
[25] Yamauchi, K. et al.: Psychoacoustic examination of feasible level of additional warning sound for quiet vehicle. In: Acoustical Science and Technology, (2015), Jg. 36 Nr. 2, S. 120-125.
[26] Yamauchi, K. et al.: An examination on required sound levels for the external acoustic sign for quiet vehicles. Internoise, (2010), Lisbon, Portugal.
[27] Genuit, K.; Fiebig, A.: Alternative alert signal concepts and their perceptual implications. Internoise, (2016), Hamburg, Germany.

Lisa Steinbach,
M. Ercan Altinsoy, Institut für Akustik und Sprachkommunikation, Professur für Akustik und Haptik, Technische Universität Dresden

Lisa Steinbach, M. Ercan Altinsoy, Institut für Akustik und Sprachkommunikation, Professur für Akustik und Haptik, Technische Universität Dresden








