Knackpunkte beim FTS-Außeneinsatz
Wer Fahrerlose Transportsysteme im Außenbereich einsetzen will, der muss einige Besonderheiten beachten. Welche dies genau sind, wurde unter anderem während eines Fachforums während der vergangenen LogiMAT besprochen.
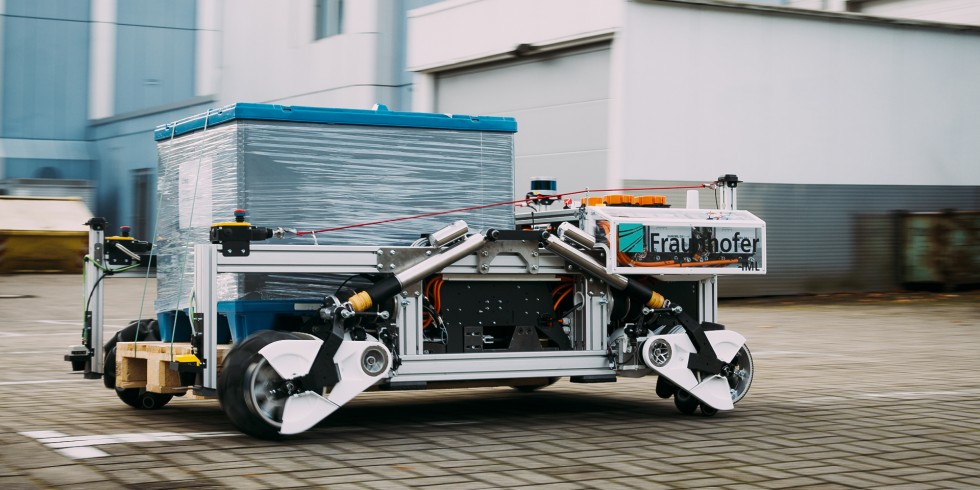
Der O3dyn zeigt: Fahrerlos und schnell sind beim modernen FTF kein Widerspruch.
Foto: Fraunhofer IML
Der innerbetriebliche Einsatz von Fahrerlosen Transportsystemen (FTS) ist nicht aufzuhalten. Allerdings findet man fahrerlose Transportfahrzeuge (FTF) und autonome mobile Roboter (AMR) zumeist innerhalb von Produktions- oder Lagerhallen. Draußen auf dem Werksgelände fahren nur selten automatische Fahrzeuge, obwohl es sicher zahlreiche sinnvolle Anwendungen gibt. Wir wollen im Folgenden die Gründe dafür aufzeigen und konkrete technische Lösungsansätze aufzeigen. Die Inhalte sind einem Fachforum entnommen, das am 26.04.2023 auf der LogiMAT in Stuttgart stattfand: „Quo Vadis, mobile Robotik?“. Eine Aufzeichnung des vollständigen Fachforums ist in der Mediathek der LogiMAT.digital verfügbar.
Effizienzsteigerung und Raumgewinn im Bestand
Dies ist beim FTS-Außeneinsatz zu beachten
Die besonderen Einsatzbedingungen im Außenbereich und die damit einhergehenden Anforderungen kann man im Wesentlichen wie folgt zusammenfassen1:
- Im Außenbereich sind eher große bzw. im Vergleich zu Einsätzen im Innenbereich deutlich größere Entfernungen zurückzulegen. Diese verlangen hohe Geschwindigkeiten, da sich sonst keine zufriedenstellende Transportleistung erzielen lässt, was wiederum die Wirtschaftlichkeit der Lösung in Frage stellt; gewünscht werden möglichst 10 km/h, manchmal sogar mehr.
- Höhere Geschwindigkeiten bedeuten längere Bremswege und erfordern entsprechend weitreichende Sensorik zum sicheren Erkennen von Hindernissen (insbes. Personen!) im und ggf. auch nahe neben dem Fahrweg des FTF.
- Der Straßenzustand ist schlechter als die Fahrwege in Hallen; daraus ergeben sich andere Anforderungen an Fahrwerk und Räder.
- Unterschiedliche Fahrbahnoberflächen – Materialien, aber auch Nässe/Schnee/Eis – führen zu unterschiedlichem „Gripp“ (technisch: unterschiedlicher Reibbeiwert µr), d. h. die Traktion und damit das Bremsvermögen und der Bremsweg verändern sich.
- Der Straßenverkehr ist draußen rauer und die Verkehrslage komplexer als in der Halle; es gibt eine größere Vielfalt bei den Verkehrsteilnehmern: Fußgänger/Fußgängergruppen, Radfahrer, abgestellte und fahrende Lkw mit und ohne Hänger, Fahrzeuge mit unterschiedlicher, auch hoher Geschwindigkeit sowie Fahrzeuge mit betriebsangehörigen oder betriebsfremden Fahrern mit unterschiedlichem Kenntnisstand bzgl. des richtigen Verhaltens gegenüber einem automatischen Fahrzeug.
- Alle Fahrzeugkomponenten, insbesondere die notwendigen und empfindlichen Steuerungs- und Sensorsysteme, sind erheblichen mechanischen Belastungen sowie Witterungseinflüssen ausgesetzt.
- Der Einfluss des Wetters auf ein Outdoor-FTF ist vielfältig. Die Bedingungen verändern sich mit den hohen oder niedrigen Temperaturen und den stark unterschiedlichen Lichtverhältnissen (Dunkelheit, bewölkter Himmel, extremer Sonnenschein, hoch- und niedrig stehende Sonne). Außerdem muss mit Nebel, Schneefall, Graupel, Hagel, Glatteis, Blitzeis, starkem Regen und Wind gerechnet werden.
Technische Lösungsansätze für den FTS-Außeneinsatz
Induktive Ladetechnik steigert Produktivität von FTS und AMR um 32 %
Wir wollen auf zwei Herausforderungen näher eingehen und dann auch jeweils eine konkrete technische Neuentwicklung als Lösung vorschlagen:
1. FTS-Außenbetrieb bei schlechten Bodenverhältnissen
Innerhalb von Hallen findet man oft den sog. „FTS-gerechten“ Boden vor oder kann diesen einfordern. Ihn zeichnen Eigenschaften aus wie ausreichende Festigkeit und Abriebfestigkeit, ausreichende (aber nicht zu hohe) Rauheit, Ebenheit (keine Vertiefungen, keine „Hügel“, keine Spurrinnen, zu breite Dehnungsfugen etc., keine zu starken „Knicke“ beim Übergang von waagerechten Streckenabschnitten auf Steigungs-/Gefällestrecken) sowie gute elektrische Erdableitfähigkeit. Wenn diese Anforderungen eingehalten werden, können Standard-FTF ohne besondere Fahrwerke, gefedert aufgehängte Räder etc. i. d. R. problemlos eingesetzt werden. Im Außenbereich sind die Anforderungen an das Fahrwerk des automatischen Fahrzeugs erheblich höher. Indoor-FTF fahren in den allermeisten Fällen ungefedert mit Vulkollan-Radbandagen. Aus Sicherheitsgründen sind die Fahrzeuge „tiefergelegt“, d. h. die Bodenfreiheit, also der Abstand zwischen Rahmen und Fußboden, ist nur wenige Zentimeter groß, damit möglichst kein Fuß oder andere Gegenstände unter das Fahrzeug geraten können. Im Außenbereich sind diese Maßnahmen meist nicht durchzusetzen. Die Bodenunebenheiten sind groß, es gibt Schwellen und evtl. Schienen, Fahrbahnbelagsänderungen (Beton, Asphalt, …), Steigungen/Gefälle etc. Üblicherweise sind Outdoor-FTF auch größer und schwerer als die klassischen Indoor-Fahrzeuge und fahren auf Vollgummi- oder Luftreifen, was regelungstechnisch deutlich anspruchsvoller ist.

Das Stuart-Fahrwerk kann Bodenunebenheiten sicher ausgleichen.
Foto: Fraunhofer IML
Bei der Auslegung des Fahrzeug-Fahrwerks besteht die Herausforderung darin, einerseits den konstruktiven und maschinenbaulichen Aufwand so gering wie möglich zu halten und andererseits dafür zu sorgen, dass das bzw. alle angetriebenen/gebremsten Räder immer, also bei allen Fahrzuständen und an allen Stellen im Fahrparcours, Bodenkontakt halten. Diese Anforderung lässt sich mit einer Dreirad-Kinematik mit einem angetrieben und gelenkten Rad und zwei fest am Fahrzeug-Chassis montierten Stützrollen einfach und kostengünstig umsetzen. Allerdings neigt dieses Fahrwerk in engen Kurven oder bei seitlicher Lastaufnahme/-abgabe zum Kippen und hat mit nur drei Rädern zudem eine hohe Flächenpressung. Jedes weitere – angetriebene oder nicht angetriebene – Rad führt zu einer statischen Überbestimmtheit und damit zur Gefahr, dass ein oder sogar mehrere Räder keinen Bodenkontakt halten können. Um dies zu verhindern, werden üblicherweise ein oder mehrere Räder mittels Feder(n) mit dem Chassis verbunden.
Allerdings birgt diese Lösung die Herausforderung der richtigen Federdimensionierung, damit sowohl bei leerem als auch bei beladenem Fahrzeug die Feder für die richtige Anpresskraft sorgt. Alternativ kann man ein oder mehrere der nicht-angetriebenen Stützräder auch so anbringen, dass sie nur in bestimmten Fahrzuständen und nur wechselweise Bodenkontakt haben, sodass in Summe nie mehr als drei Räder den Boden berühren – dies führt aber zu unschönem „Kippeln“ beim Beschleunigen und Bremsen.
Vom Fraunhofer IML wurde erstmals auf der LogiMAT 2023 eine zum Patent angemeldete Lösung für das Problem vorgestellt, die ohne aktive (angetriebene oder gefederte) Elemente auskommt – das Stuart-Fahrwerk (Stable Transport in Uneven And Rough Terrains). Die Gelenke und Hebel des Fahrwerks lösen die statische Überbestimmung des Vierrad-Fahrwerks auf. Sie ergeben zwei um die mittlere Differentialantriebsachse gelenkig verbundene Aufstandsdreiecke, die die Kippneigung konventioneller vierrädriger Differentialantriebe auf unebenem Boden eliminieren, dafür sorgen, dass auch bei einem stark unebenen Boden alle Räder stets Bodenkontakt halten und außerdem durch die Auslegung der Hebellängen des Fahrwerks die Anpresskraft auf dem mittigen Differentialantrieb proportional zum Gesamtgewicht des Fahrzeugs ist.
Lieferketten Sorgfaltspflichtengesetz: Soziale Nachhaltigkeit per Gesetz?
2. FTS-Außenbetrieb beu unbekannten Reibbeiwerten des Untergrunds
Sollen Fahrzeuge draußen mit möglichst hoher bzw. maximal möglicher Geschwindigkeit sicher fahren und bremsen können, stellt sich die Frage nach dem zeitlich und räumlich aktuellen Reibbeiwert zwischen den angetriebenen bzw. gebremsten Rädern und dem Boden. Denn dieser Wert ist für die maximal übertragbare Antriebs- bzw. Bremskraft und damit insbesondere für die Länge des Bremswegs maßgeblich.
Er ist nicht nur von der Fahrbahndecke, sondern auch von den Witterungsverhältnissen abhängig. Bei – ggf. erheblich – verringerter Reibung aufgrund von verschmutzter, nasser oder vereister Fahrbahn ergeben sich ggf. sehr lange Bremswege. Der Nothalt-Bereich muss bei hoher Geschwindigkeit entsprechend weit ausgelegt sein und bei Kurvenfahrt muss ggf. die Geschwindigkeit reduziert werden. Zur Wahl der momentan richtigen/ angepassten Geschwindigkeit durch die Fahrzeugsteuerung ist es erforderlich, den aktuell wirkenden Reibungskoeffizienten zu kennen – sonst müsste aus Sicherheitsgründen eine deutlich verringerte, aber unter allen Umständen sichere Geschwindigkeit gewählt werden.
Ein wirtschaftlicher Einsatz von Outdoor-FTF erfordert letztlich eine automatische, fahrzeugseitige und in Echtzeit laufende Ermittlung des Reibbeiwertes, um jederzeit die maximal mögliche sichere Geschwindigkeit errechnen und fahren zu können.
Der ebenfalls vom Forum-FTS zum Patent angemeldete Lösungsansatz sieht vor, dass an der rechten und linken Fahrzeugseite in der Nähe der Antriebsräder zwei zusätzliche, federangepresste Messräder angebracht werden. Beide Räder verfügen über je einen eigenen Antriebsmotor, durch den im permanenten Wechsel die beiden folgenden Zustände erreicht werden können:
Der Motor treibt das auf den Boden gepresste Messrad mit einem immer größer werdenden Moment an, bis das Rad die Kraft nicht mehr auf den Boden übertragen kann und es – sprunghaft – zu schlupfen beginnt (es dreht durch).
Der Motor bremst das Messrad mit immer größerem Moment ab, bis es schließlich ebenfalls die Kraft nicht mehr auf den Boden übertragen kann und blockiert.
Beide Grenzfälle lassen sich durch Überwachung der aktuellen Drehzahl messtechnisch einfach erfassen. In beiden Fällen ist das Grenz-Drehmoment ein Maß für den aktuell und lokal geltenden Reibbeiwert, d. h. die Fahrzeugsteuerung kann auf der Basis dieses Wert die aktuelle Geschwindigkeit an die aktuellen Bedingungen anpassen (erhöhen oder verringern).
3. FTS-Außenbetrieb beim Fahren mit hoher Geschwindigkeit
Das Betriebsgelände großer Unternehmen haben mitunter Flächen von mehreren Quadratkilometern. Innerbetriebliche Transporte im Außenbereich verlangen deshalb höhere Geschwindigkeiten. Im Fraunhofer IML wurde dazu ein besonders spektakuläres Fahrwerk entwickelt, nämlich der O3dyn: Outdoor, omnidirektional, open-source und dynamisch: dafür steht O3dyn – und der Name ist Programm.
Ausgestattet mit Mecanum-Rädern manövriert der Palettentransporter präzise und auf engstem Raum. Für sicheren Bodenkontakt und gute Fahreigenschaften sorgt das Luftfahrwerk, unabhängig von der Beladung. Mit bis zu 140 Millimeter Bodenfreiheit und Federweg stellen Kopfsteinpflaster, Schwellen und sogar Schlaglöcher kein Hindernis für ihn dar, während vier Motoren mit einer Systemleistung von etwa 60 kW bis zu einer Geschwindigkeit von 36 km/h für Vortrieb sorgen.
Mit modernster Sensorik und Computertechnik an Bord navigiert der autonome Transportroboter nicht nur souverän im Innen- und Außenbereich, sondern auch durchs Hallentor und stellt sich dabei situativ auf die verschiedenen Anforderungen an Umgebungserfassung und Lokalisierung ein.
Zusammenfassung: Dies ist beim FTS-Außeneinsatz zu beachten
Der Außeneinsatz von Fahrerlosen Transportfahrzeugen birgt eine Reihe von Herausforderungen, damit das System sicher und mit höchster technischer Verfügbarkeit funktioniert. Es muss mit vielfältigen Störeinflüssen gerechnet werden, wie oben beschrieben.
Letztlich soll das automatische Fahrzeug auf unebenen Straßen sicher schnell fahren können. Dazu braucht es ein Fahrwerk, dass mit schlechten Straßenzuständen zurechtkommt. Dazu hat das IML zwei konstruktive Vorschläge gemacht: Das Stuart-Fahrwerk und der O3dyn.
Und im Forum-FTS nimmt man die Anforderung ernst, dass ein Fahrzeug jederzeit wissen muss, wie schnell es fahren darf. Dazu braucht es die ständige Kenntnis des aktuellen Reibwertes zwischen den Rädern und der Fahrbahn. Auch dazu gibt es jetzt einen konzeptionellen Vorschlag. Damit wird eine zentrale Sicherheitsanforderung an Outdoor-FTF erfüllt!
So wollen wir nicht nur die Herausforderungen benennen, sondern auch aktiv zur Lösung der technischen Fragestellungen beitragen.
1 Ullrich, G.; Albrecht, T.: Fahrerlose Transportsysteme. Eine Fibel zur Technik – mit Praxisanwendungen – für die Planung– mit der Geschichte. Springer Vieweg, Springer Fachmedien Wiesbaden 2011, 2014, 2019, 2023. ISBN des eBooks: 978–3–658–38738–9, ISBN des gedruckten Buches: 978–3–658–38737–2, 4. Auflage, April 2023.
Thomas Albrecht, Leiter Fahrerlose Transportsysteme (FTS) beim Fraunhofer IML, Dr. Günter Ullrich, Leiter des VDI-Fachausschusses FTS und des Forum-FTS








