Bewegung von Menschen direkt auf Roboter übertragen
Humanoide, die sich im Gelände fortbewegen, kippen bei unebenen Böden oder bei Stößen gegen Hindernisse leicht um. Mit speziellen Westen stabilisieren Bediener die Roboter – und erhalten sogar taktiles Feedback.
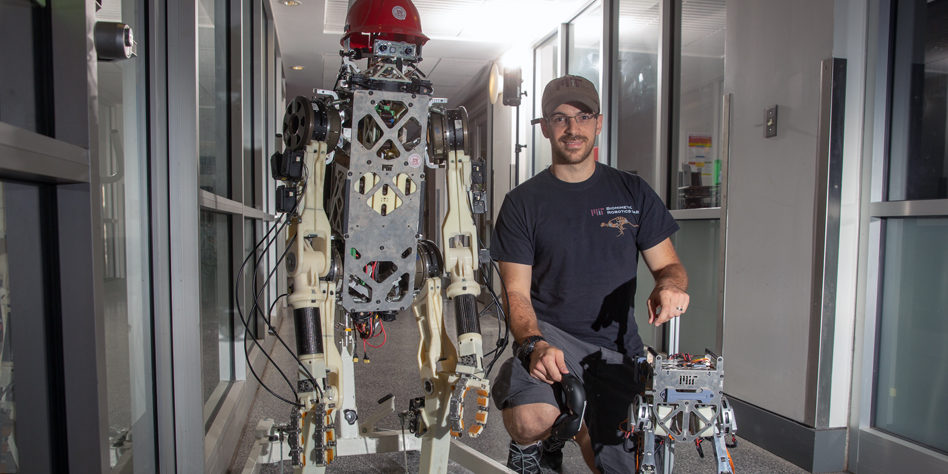
HERMES und HERMES Little bei Tests im Labor.
Foto: Tony Pulsone / MIT
Ingenieure sehen etliche Einsatzmöglichkeiten für Roboter – vom Tragen schwerer Lasten in unwegsamem Gelände über Reparaturaufgaben an gefährlichen Stellen bis hin zur Rettung von Menschen aus Krisengebieten. Die Entwicklung macht große Fortschritte. Ein Schwachpunkt bleibt aber, dass Humanoide sich schwer steuern lassen und beim Gang auf zwei technischen Beinen leicht das Gleichgewicht verlieren.
Deshalb haben Ingenieure am Massachusetts Institute of Technology (MIT), Cambridge, und an der University of Illinois at Urbana-Champaign eine neue Methode entwickelt. Ihr Roboter, der einem Torso mit zwei Beinen ähnelt, wird von einem menschlichen Bediener ferngesteuert. Dieser Operator trägt eine Hightech-Weste. Seine Bewegungen übertragen sich direkt auf den Humanoiden. Gleichzeitig wird Feedback gegeben.
Entwicklung von Robotern mit Teleoperation
Im ersten Schritt konstruierten Entwickler das zweibeinige Robotersystem Hermes (Highly Efficient Robotic Mechanisms and Electromechanical System) sowie das kleinere Modellsystem Hermes Little. Auch eine spezielle Weste mit Sensoren, um die Bewegungen eines Bedieners per Teleoperation zu erfassen und auf die Maschine zu übertragen, wurde erarbeitet.
Durch die Weste kann ein Bediener aber nicht nur Bewegungen des Roboters lenken. Er spürt auch Kräfte, die auf die Maschine einwirken und sie aus dem Gleichgewicht bringen, etwa durch Unebenheiten des Bodens. Beginnt der Roboter zu kippen, nimmt der Operator eine ähnliche Kraft über seine Weste wahr. Er bewegt seinen Körper, um sich – und damit auch den Roboter – wieder in eine stabile Position zu bringen.
„Es ist, als würde man mit einem schweren Rucksack laufen. Man spürt, wie sich die Dynamik des Rucksacks um einen herum verändert, und man kann Ungleichgewichte richtig kompensieren“, sagt Joao Ramos. Er forscht am MIT als Postdoktorand. „Wenn Sie jetzt eine schwere Tür öffnen müssen, kann der Mensch dem Roboter befehlen, seinen Körper gegen die Tür zu werfen, ohne das Gleichgewicht zu verlieren.“
Wie lässt sich ein Roboter stabilisieren?
Zum Hintergrund: Damit Roboter die Balance ihres Bedieners übernehmen und nicht nur Bewegungen kopieren, musste das Team zunächst einen Weg finden, um das Gleichgewicht technisch abzubilden. Ingenieure erkannten zwei wesentliche Aspekte: den Massenschwerpunkt und den Druckmittelpunkt. Beide Größen würden Ramos zufolge beschreiben, wie stabil der Roboter in einer bestimmten Situation sei.
Anschließend zeichnete Ramos im Labor Bewegungsmuster menschlicher Probanden auf, um Stabilitätsgrenzen zu erfassen. Seine Versuchsteilnehmer sprangen auf einer Bodenplatte, die Kräfte misst. Sie schwankten hin und her, um zu erfassen, wie menschliche Reflexe ein Umfallen verhindern. Anschließend entwickelte Ramos ein Modell, das alle Parameter in Relation zueinander darstellt. Daraus entstand der Steuerungsalgorithmus für Hermes Little, der auf Hermes übertragen wurde.
Nicht nur menschliche Bewegungen kopieren
Die Ingenieure ließen Hermes Aufgaben unter verschiedenen Bedingungen ausführen. Ihr Humanoide konnte eine Tasse Kaffee eingießen, Holz hacken oder mit einem Feuerlöscher simulierte Brände bekämpfen. War er fest mit dem Untergrund verankert, gelang es ihm auch ohne Software, Kraft aufzuwenden und stabil zu bleiben. Wenn der Roboter jedoch Schritte unternehmen musste, um Tätigkeiten auszuführen, war die Gefahr, ohne Bediener umzukippen, deutlich größer.
Im Labor fand Ramos heraus, dass er beim Tragen der Weste nicht nur die Bewegungen und das Gleichgewicht des Roboters kontrollieren, sondern auch fühlen konnte, wenn Kräfte aus das Gerät einwirkten: Als ein Hammer den Roboter traf, spürte Ramos, wie die Weste in die Richtung ausgelenkt wurde, in welche sich das Gerät bewegte. Er steuerte selbst dagegen an – und die Maschine blieb stabil.

„Wir haben festgestellt, dass es nicht ausreicht, menschliche Bewegungen zu kopieren, um hohe Kräfte zu erzeugen oder schwere Objekte zu bewegen, da Roboter leicht fallen würden“, fasst Sangbae Kim, Professor für Maschinenbau am MIT, zusammen. Dies lasse sich vermeiden, indem dynamische Reaktionen eines menschlichen Bedieners übertragen würden. Und Ramos ergänzt: „Da Sie eine Person haben, die Bewegungen vormacht, lernt der Roboter im Handumdrehen neue Tätigkeiten.“
Kim und Ramos werden ihren Humanoiden mit Gleichgewichtskontrollen weiter optimieren. Ihr Ziel ist es, ein System für Rettungs- oder Bergungseinsätze aufzubauen.
Mehr zum Thema Roboter
Ein Beitrag von:
















