Dieser künstliche Muskel gibt Robotern Superkräfte
Ein 2,6 Gramm leichter künstlicher Muskel, der das Tausendfache seines Gewichts anhebt: Das ermöglicht Falttechnik nach dem Origami-Prinzip. Kann die Erfindung von MIT-Ingenieuren in der Soft-Robotics-Branche für Furore sorgen?

Ein Greifer hebt mit künstlichen Muskeln einen Autoreifen. Die Muskeln sind in der Lage, das Tausendfache ihres Eigengewichts zu heben.
Foto: Shuguang Li/Wyss Institute/Harvard University
Müssen Roboterarme aus Metall bestehen? Nein, sie können auch Leichtgewichte sein. Um den Beweis anzutreten, haben Forscher des Massachusetts Institute of Technology (MIT) und der Harvard University gebastelt. Inspiriert von Origami – die japanische Kunst des Papierfaltens – haben sie eine Kunststofffolie zu einem akkordeonähnlichen Skelett zurechtgeknickt und in einem Kunststoffbeutel versiegelt. Sobald eine Pumpe ein Vakuum erzeugt, ziehen sich Haut und Skelett auf 10 % ihrer Ursprungsgröße zusammen und erzeugen eine Hebebewegung.
So stark wie eine Stockente, die ein Auto anhebt
Der künstliche Muskel erzeugt erstaunliche Kräfte. Er wiegt nur 2,6 g, kann aber ein 2,6 kg schweres Gewicht anheben, also das Tausendfache seines Eigengewichts. Diese Relation lässt Industrieroboter alt aussehen, zeigt ein Vergleich des Onlinemagazins wired: Der Roboterarm UR10 wiegt 29 kg und hebt 10 kg schwere Gewichte, also nur knapp ein Drittel seines Eigengewichts.

Das Prinzip des künstlichen Muskels ist simpel: Ein gefaltetes Kunststoffskelett, versiegelt in einem Kunststoffbeutel, zieht sich im Vakuum zusammen.
Quelle: Wyss Institute/Harvard University
Der künstliche Muskel ist so stark wie eine Stockente, die ein Auto anhebt, so die Forscher. „Wir waren überrascht, wie stark die Aktoren sind“, sagt Roboter-Ingenieurin Daniela Rus vom MIT. Mit einer Steigerung des Funktionsgewichts um das Tausendfache habe man nicht gerechnet. „Es ist, als würde man diesen Robotern Superkräfte geben.“
Muskelgröße reicht von wenigen Millimetern bis zu einem Meter
Die Muskeln sind nicht auf Hebebewegungen beschränkt. Die Forscher haben bereits Skelettstrukturen aus verschiedenen Materialien gefaltet, die beim Zusammenziehen Schraub- und Drehbewegungen ausführen. Die Skelettfalten bestimmen, wie sich die gesamte Struktur bewegt, sagt Wissenschaftler Shuguang Li vom Wyss Institut der Harvard Universität. „Im Prinzip bekommt man diese Bewegung kostenlos, ohne ein Kontrollsystem zu benötigen.“
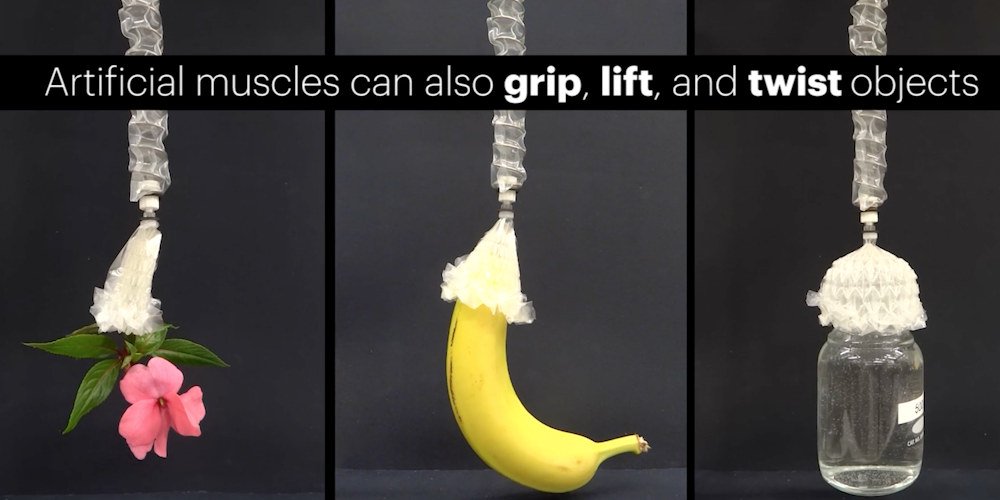
Der künstliche Muskel kann Objekte nicht nur anheben, sondern auch Dreh- und Schraubbewegungen ausführen.
Quelle: Wyss Institute/Harvard University
Die Tüftler haben auch schon künstliche Muskeln in den unterschiedlichsten Größen gebaut. „Wir haben sie in Größen von wenigen Millimetern bis zu einem Meter gebaut, und ihre Leistung hält auf der ganzen Linie an“, sagt Forscher Rob Wood vom Wyss Institute. „Jetzt, da wir Aktuatoren mit natürlichen Muskeleigenschaften geschaffen haben, können wir uns vorstellen, fast jeden Roboter für fast jede Aufgabe zu bauen.“
Exoskelette und Roboterarme für die Weltraumforschung
Mögliche Einsatzmöglichkeiten für die künstlichen Muskeln haben die Forscher bereits vor Augen. Rus: „Wir glauben, dass sie die Art und Weise verändern werden, wie wir Soft Robotics in Fabriken, im Haushalt und im Alltag einsetzen.“ Denkbar wäre zum Beispiel der Bau chirurgischer Miniaturgeräte, tragbarer Exoskelette oder Roboterarme für die Weltraumforschung. Für die künstliche Haut könne man Silikon verwenden, um den künstlichen Muskel hitzebeständig zu machen. „Die Möglichkeiten sind wirklich grenzenlos.“
Ein Beitrag von:














