Dieser Roboter backt Pizza!
MIT-Forschende haben einen zweistufigen Lernprozess entwickelt, der ganz neue Anwendungsmöglichkeiten für Roboter eröffnet. Unter anderem werden sie in die Lage versetzt, mit verformbaren Objekten zu arbeiten – wie Pizzateig.
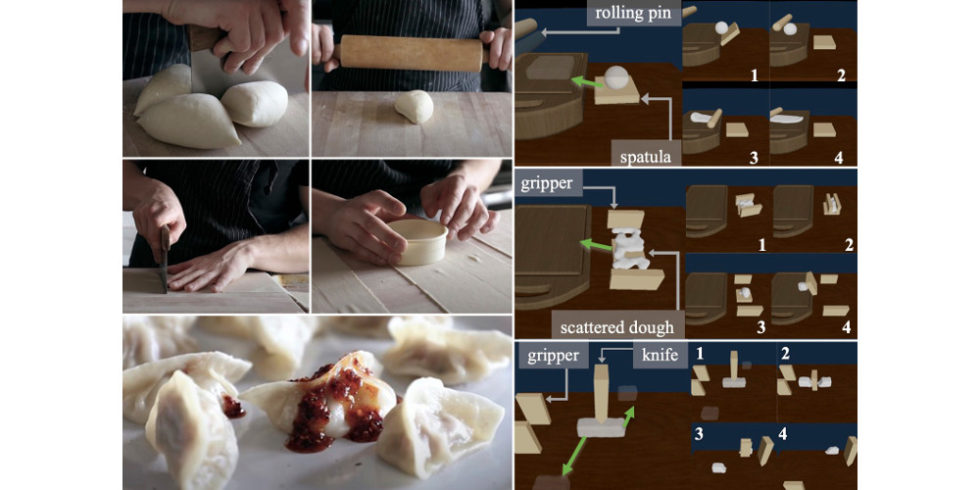
In der Simulation (rechts) werden die Handgriffe des Menschen nachgebildet.
Foto: MIT
Erst wenn man einen Roboter programmieren will, wird klar, was für ein faszinierendes Gebilde der Mensch ist: Für uns ist es überhaupt kein Problem, einen Pizzateig zu kneten und mit einem Nudelholz auszurollen, aber ein Roboter kann das nicht – normalerweise. Denn die Schwierigkeit besteht darin, die Tätigkeiten in einer Gleichung darzustellen. Der weiche Teig verformt sich leicht, was zu viele Optionen bietet. Hinzu kommt die Tatsache, dass neben mehreren Arbeitsschritten auch verschiedene Werkzeuge nötig wären, etwa ein Spatel, um den Teig auf ein Brett zu heben und ein Äquivalent für das erwähnte Nudelholz. Ein Roboter lernt durch Versuch und Irrtum, und diese Aufgabe scheint für ihn zu komplex zu sein. Das haben allerdings Ingenieurinnen und Ingenieure vom Massachusetts Institute for Technology (MIT) anders gesehen. Gemeinsam mit Kolleginnen und Kollegen der Carnegie Mellon University und der University of California in San Diego haben sie einem Roboter das Pizzabacken beigebracht, zumindest in einer Simulation.
IFR: Die fünf Top Roboter-Trends 2022
Roboter-System besteht aus einem Lehrer und einem Schüler
Ihre Lösung ist ein Roboter-Manipulationssystem, das über einen zweistufigen Lernprozess funktioniert. Vereinfacht gesagt, läuft das folgendermaßen ab: Ein „Lehrer“-Algorithmus löst zunächst jeden einzelnen Schritt, den der Roboter ausführen muss, um die Aufgabe zu erfüllen. In Stufe zwei unterrichtet dieser Lehrer ein maschinelles Lernmodell (Schüler) darin, auf einer abstrakten Ebene zu verstehen, wann und wie die einzelnen Fähigkeiten ausgeführt werden müssten, die während der Aufgabe benötigt werden. Mit diesem Wissen kann das System entscheiden, wie es seine Fähigkeiten anwenden muss, um die gesamte Aufgabe zu bewältigen.
Die Forscher zeigen, dass diese Methode, die sie DiffSkill nennen, in der Lage ist, komplexe Manipulationsaufgaben in Simulationen auszuführen, unter anderem das Verarbeiten von Teig oder das Aufsammeln von Teigstücken um ein Schneidebrett herum.
„Diese Methode ist näher dran an der Art und Weise, wie wir als Menschen unsere Handlungen planen“, sagt Yunzhu Li, Doktorandin im Computer Science and Artificial Intelligence Laboratory (CSAIL) des MIT. „Wenn ein Mensch eine Aufgabe mit langem Zeithorizont ausführt, schreiben wir nicht alle Details auf. Wir haben einen übergeordneten Plan, der uns grob die Etappen und einige der Zwischenziele vorgibt, die wir auf dem Weg dorthin erreichen müssen, und dann führen wir sie aus.“
Weltmarkt: Fast die Hälfte der Roboter kommen aus Japan
Roboter setzt abstraktes Wissen in konkrete Bewegungen um
Der „Lehrer“ im Rahmen von DiffSkill ist ein Algorithmus zur Trajektorienoptimierung, der also die Bewegungen eines Roboters verbessert. Er kann Aufgaben mit kurzem Zeithorizont lösen, bei denen der Ausgangszustand und der Zielort eines Objekts nahe beieinander liegen. Der Trajektorienoptimierer arbeitet in einem Simulator, der die Physik der realen Welt modelliert. Der „Lehrer“ nutzt die Informationen des Simulators, um zu erfassen, wie sich der Teig in jeder Phase bewegen muss, und gibt dann die entsprechenden Werte für die benötigten Roboter-Bewegungen aus.
Dann lernt das neuronale Netz des „Schülers“, die Aktionen des „Lehrers“ zu imitieren. Als Eingaben verwendet es zwei Kamerabilder, eines, das den Teig in seinem aktuellen Zustand zeigt, und ein anderes, das den Teig am Ende der Aufgabe zeigt. Das neuronale Netz erstellt einen Plan auf hoher Ebene, um zu bestimmen, wie die verschiedenen Fähigkeiten miteinander verknüpft werden müssen, um das Ziel zu erreichen. Anschließend generiert es für jede Fähigkeit spezifische Bewegungsbahnen (Trajektorien) mit kurzem Zeithorizont und sendet die Befehle direkt an die Werkzeuge.
Roboter löst komplexe Aufgaben in Simulationen problemlos
Die Wissenschaftlerinnen und Wissenschaftler haben diese Technik benutzt, um den Roboter in Simulationen drei verschiedene Aufgaben mit dem Teig ausführen zu lassen. Bei einer Aufgabe verwendete der Roboter einen Spatel, um den Teig auf ein Schneidebrett zu heben, und dann ein Nudelholz, um ihn zu glätten. Bei einer anderen Aufgabe sammelt er mit einem Greifer Teig von der ganzen Theke ein, legte ihn auf einen Spatel und dann auf ein Schneidebrett. Bei der dritten Aufgabe schnitt der Roboter den Teigstapel mit einem Messer in zwei Hälften und transportierte dann jedes Stück mit einem Greifer an einen anderen Ort.
Als Nächstes wollen die Forschenden die Leistung von DiffSkill weiter verbessern, indem sie statt der Bilder 3D-Daten als Eingaben verwenden. Außerdem wollen sie den Planungsprozess des neuronalen Netzes effizienter gestalten und mehr unterschiedliche Trainingsdaten sammeln, um die Fähigkeit von DiffSkill zu erhöhen, sein Wissen so zu verallgemeinern, dass es auf neue Situationen übertragen werden kann.
Natürlich geht es nicht wirklich darum, menschliche Pizzabäcker zu ersetzen, aber die neuen Fähigkeiten lassen sich hervorragend auf andere Bereiche übertragen. Ein gutes Beispiel wären Pflegeroboter, die komplexe Handlungen bei motorisch eingeschränkten Menschen ausführen könnten und sie zum Beispiel baden oder anziehen.

Mehr lesen über Roboter:
Ein Beitrag von:

















