Mensch an Roboter: Nehme Bodenprobe vom roten Marsgestein
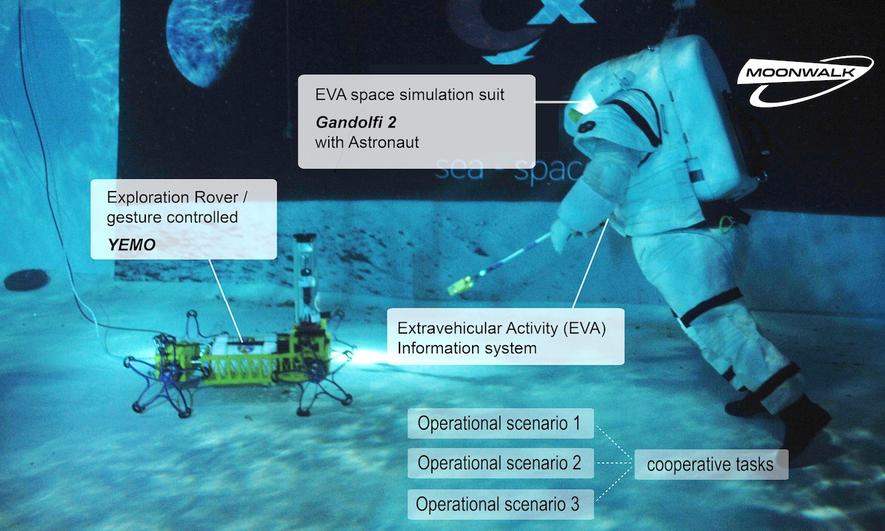
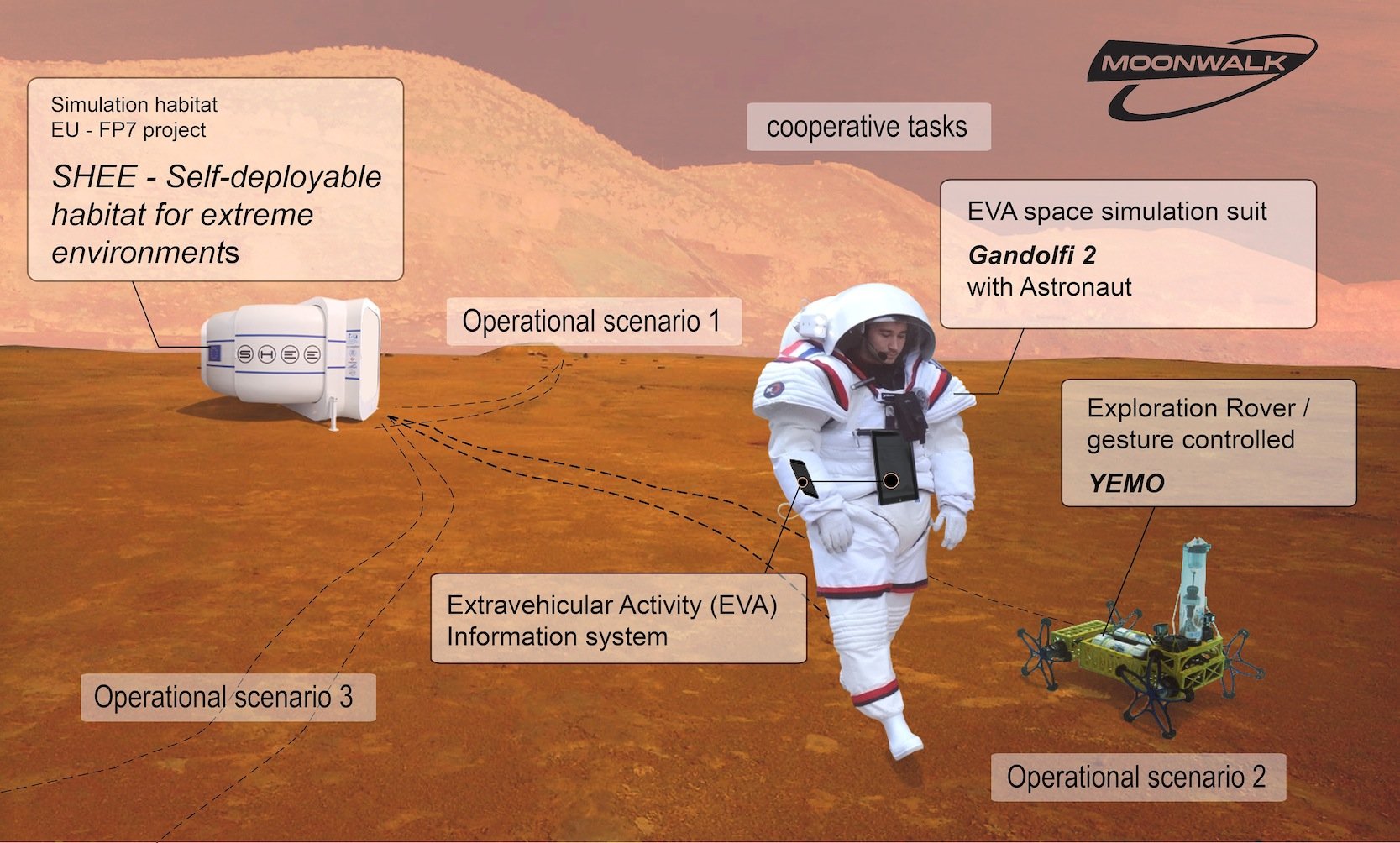
Das wär doch klasse: Ein Astronaut geht über den Mond oder den Mars und hat als nützlichen Helfer einen kleinen Roboter dabei. Dieses Szenario wird derzeit im Projekt Moonwalk simuliert. Zu Lande und unter Wasser testen Ingenieure, wie der Mensch und Rover Yemo miteinander klarkommen.

Mensch an Roboter: "Bitte Gesteinsprobe nehmen." Bremer Forscher erproben derzeit das Zusammenspiel von Mensch und Roboter. Ziel ist es, Astronauten auf Langzeitmissionen etwa bei der Erkundung des Mars zu unterstützen. Dazu haben sie den Roboter Yemo entwickelt, der sogar 50 m tief tauchen kann.
Foto: Comex 2016



Wenn davon die Rede ist, dass Mensch und Roboter gemeinsam den Weltraumeinsatz proben, kommt unweigerlich der kleine R2-D2 in den Sinn. Der Droide aus Star Wars war nicht nur ein erfahrener Mechaniker und Kopilot, sondern auch ein mutiger und treuer Freund. Ganz so weit sind wir in der Realität zwar noch nicht, aber im von der EU geförderten Projekt Moonwalk wird die enge Zusammenarbeit zwischen Mensch und Roboter, speziell zwischen Astronaut und Rover, getestet. Die erste Simulationskampagne findet derzeit in wüstenähnlicher Landschaft statt. Danach geht es unter Wasser.
Yemo ist mit Kamera, GPS und Lagesensor ausgerüstet
Bei der ersten Simulationskampagne, die bis Ende April dauert, testen Wissenschaftler die Zusammenarbeit von Astronaut und Roboter in einem ehemaligen Übertagebergbaugebiet im spanischen Río Tinto, das aufgrund seiner geochemischen Eigenschaften der Marsoberfläche ähnelt. Astronaut und Yemo erkunden gemeinsam das Gelände, führen Messungen durch und nehmen Proben – wobei der Roboter auch in für den Menschen potenziell gefährliches Terrain vordringen soll, zum Beispiel in Höhlen. Zudem soll er steile Abhänge überwinden.
Bis Ende April testen Wissenschaftler die Zusammenarbeit von Astronaut und Roboter in einem ehemaligen Übertagebergbaugebiet im spanischen Río Tinto. Dabei muss der Roboter Yemo auch in potenziell gefährliches Terrain vordringen, zum Beispiel in Höhlen.
Quelle: Liquifer

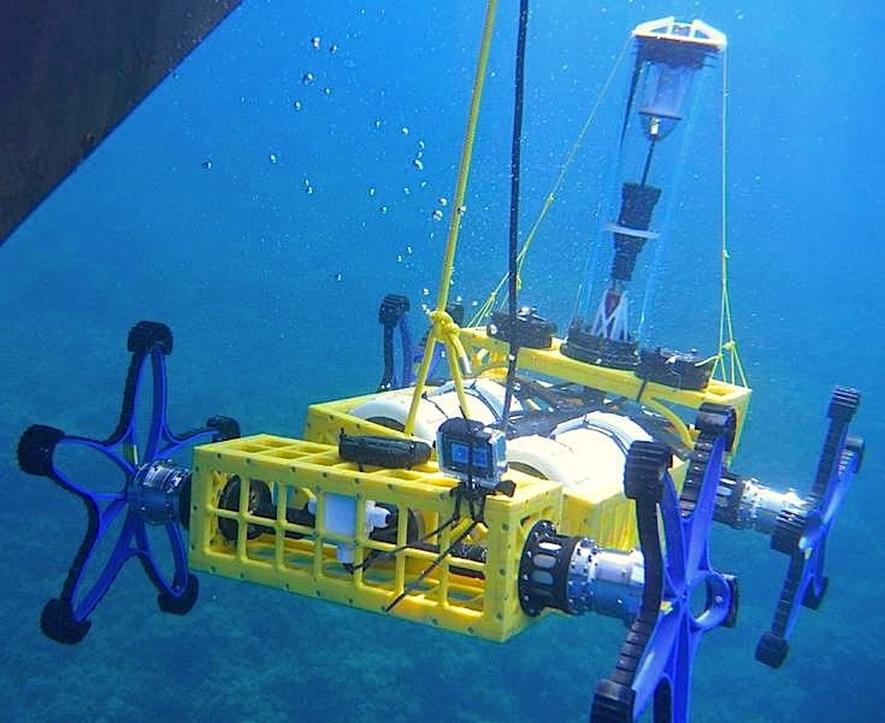
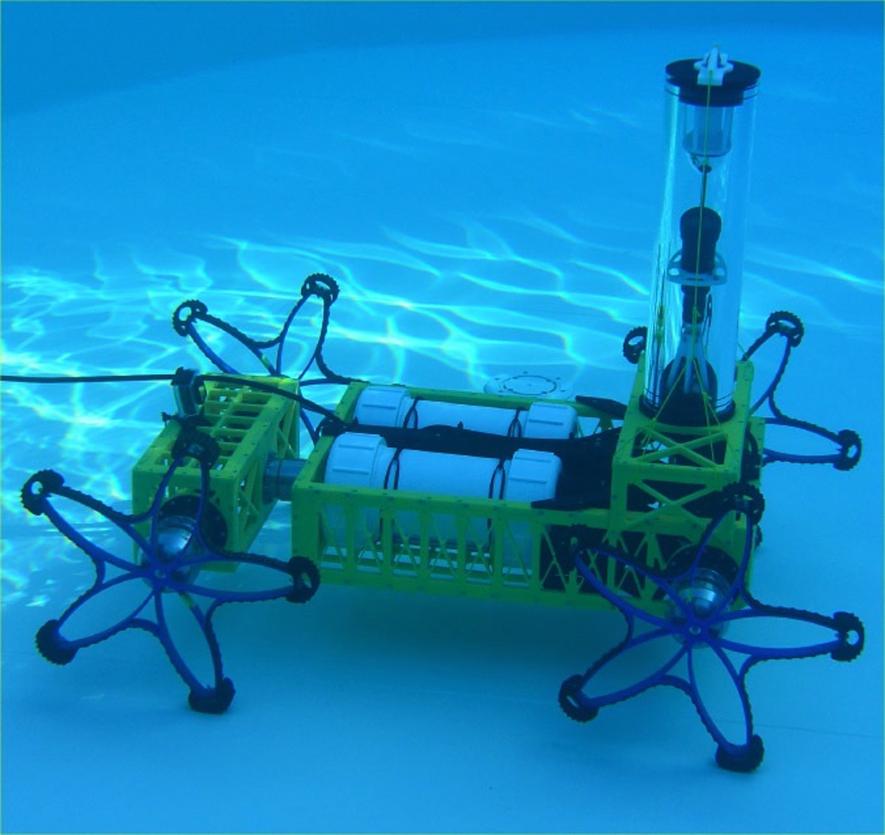
Dafür ist Yemo, die robotische Plattform, die vom Robotics Innovation Center des DFKI in Bremen entwickelt wurde, gut gerüstet und auch in schwierigem Gelände mobil. Zwischen Vorder- und Hinterachse hat der Rover ein passives Gelenk, das den Bodenkontakt aller vier Sternräder erlaubt. Der Rover hat neben einem Lagesensor mit Kompass auch einen internes GPS, das die absolute Position erfassen kann.
Bei einer zweiten Simulationskampagne vom 28. Mai bis 12. Juni tauchen Astronaut und Roboter in der Mittelmeerbucht der französischen Stadt Marseille ab, deren Meeresgrund der Beschaffenheit einer Mondlandschaft ähnelt. Die Unterwassertests sollen die Effekte der geringen Schwerkraft von Mondmissionen simulieren, welche die Interaktion zwischen Mensch und Maschine zusätzlich erschweren könnten.
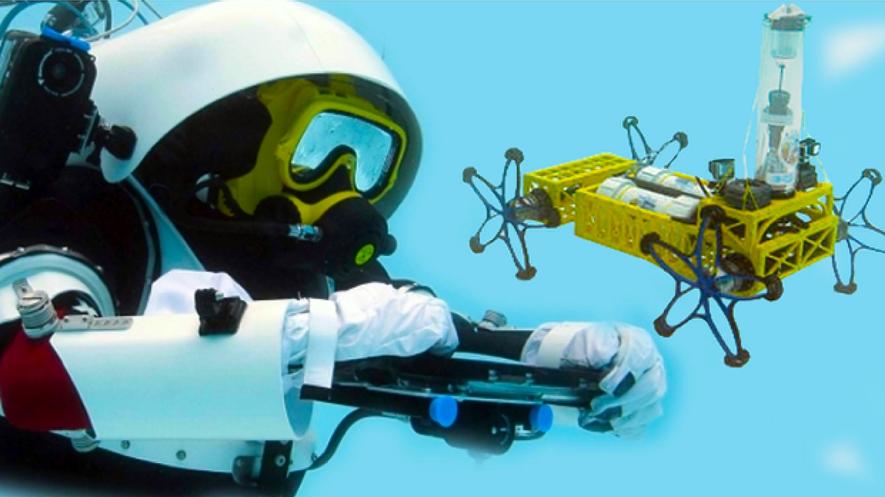
Der Astronaut kommuniziert über Gesten mit Yemo
Seit 2013 wird das Projekt von der Europäischen Union im Bereich „Space Research“ gefördert und vom Deutschen Forschungszentrum für Künstliche Intelligenz DFKI in Bremen koordiniert. Gemeinsam mit weiteren Projektpartnern wollen die Wissenschaftler des DFKI erforschen, wie Astronauten von Robotern bei der Erkundung planetarer Oberflächen unterstützt werden können.

Der Roboter Yemo soll Astronauten bei Expeditionen auf dem Mond oder dem Mars unterstützen. Er wiegt 27 kg und hat einen elektrischen Vierrad-Antrieb. Durch die Sternräder kann er sich auch in unwegsamen Gebieten vorarbeiten.
Quelle: Annemarie Hirth/DFKI
Der Fokus liegt dabei auf der Interaktion zwischen Astronaut und Roboter, die auch aufgrund des dicken Raumanzugs und der reduzierten Schwerkraft, die den Astronauten relativ unbeweglich machen, zur großen Herausforderung wird.
Die robotische Plattform Yemo ist als Mikro-Rover konzipiert, der sowohl an Land als auch unter Wasser bis 50 m tief in schwierigem Gelände einsetzbar ist. Ausgestattet mit einer 360°-Kamera kann der Roboter seine Umgebung umfassend betrachten. Dazu gibt es ein Interface, mit dem Astronaut und Roboter miteinander kommunizieren können.
Die Steuerung erfolgt über Gesten des Astronauten, die an den Roboter übertragen werden. Dafür wird der Astronautenanzug mit Sensoren ausgestattet, die es erlauben, die Gesten zu erkennen, die der Astronaut mit seinen Armen und Händen macht.

ISS an Erde: Roboter Centaur lässt sich über eine Distanz von mehr als 400 Kilometern präzise fernsteuern. Hochsensible Sensoren ermöglichen die Übertragung haptischer Tasterfahrungen ins Weltall.
Quelle: ESA
Erst im vergangenen Jahr haben die Astronauten der ISS einen Versuch unternommen, einen Roboter fernzusteuern. Der dänische Astronaut Andreas Morgensen steuerte auf der ISS den Roboter Centaur in Holland, der einen schmalen Metallpin aus einem Loch in einem Arbeitsboard herausnehmen und den Stift später wieder dort hineinstecken musste. Der Versuch gelang.
Ein Beitrag von:














