Roboter-Heuschrecke Hector krabbelt über Stock und Stein
Hector aus Bielefeld überwindet Hindernisse wie eine echte Stabheuschrecke. Das Außenskelett des ein Meter großen Roboters besteht aus CFK, die sechs Beine haben je drei elastische Gelenke und Sensoren. Diese sind im elektronischen Gehirn verknüpft, sodass Hector nach dem Prinzip Versuch und Irrtum laufen lernt.
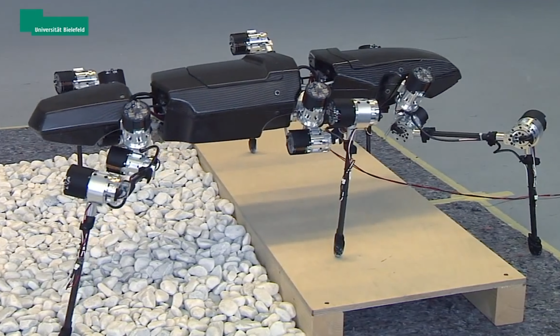
Die Roboter-Heuschrecke Hector bewegt sich eigenständig durch unebenes Gelände: Stößt eines der Beine an einen Hindernis, ermittelt das elektronische Gehirn die optimale Aktion, um es zu umgehen.
Foto: Universität Bielefeld
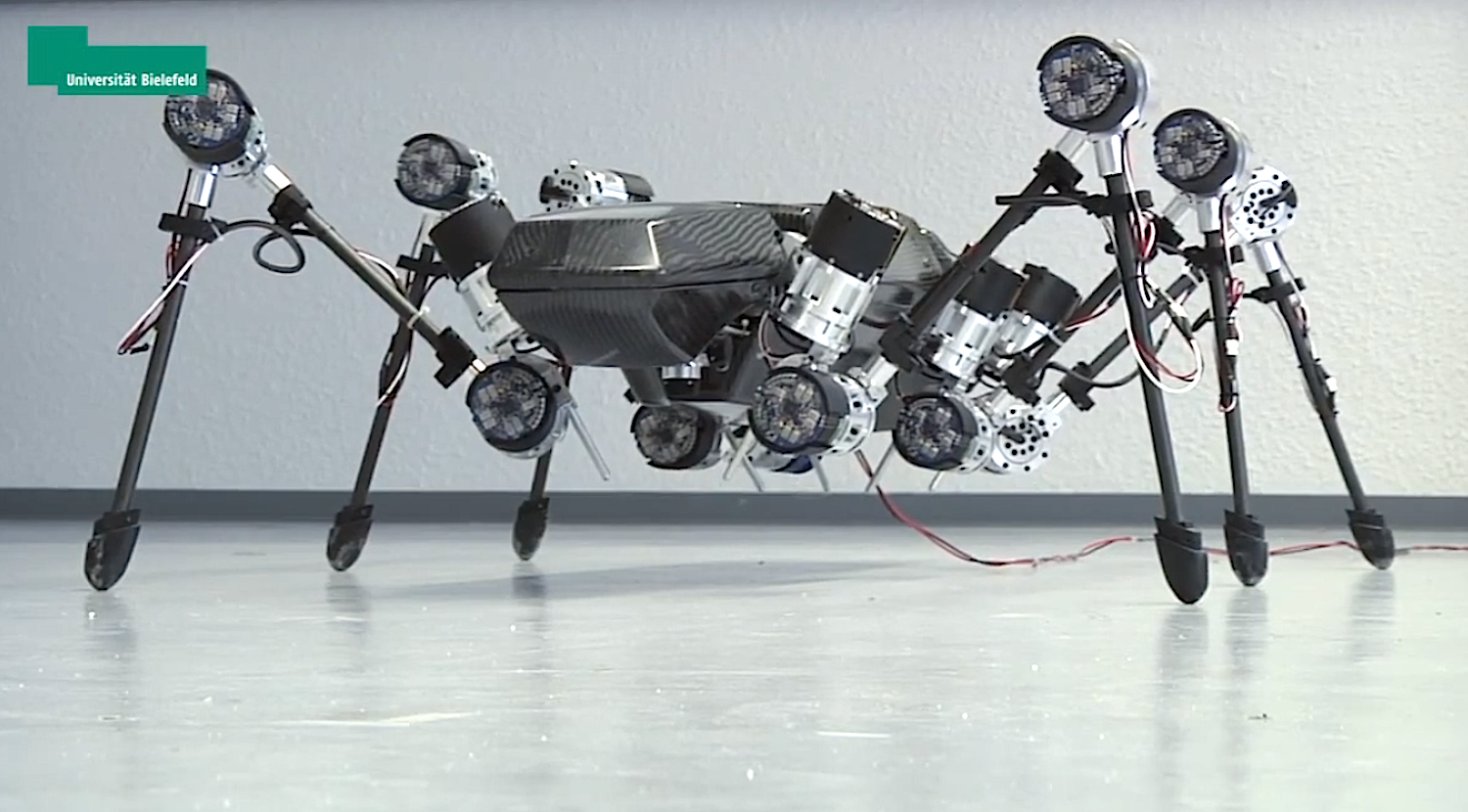
Nur eins passt nicht ins Bild: Hector ist knapp einen Meter groß und damit rund fünfmal so lang wie eine normale Stabheuschrecke. Kein Wunder, denn das Wesen ist ein weltweit einmaliger Roboter mit einem Panzer aus kohlefaserverstärktem Kunststoff (CFK), einem Nervensystem aus Kabeln, Bits und Bytes sowie Beinen aus Kunststoff und Metall.
Gebaut haben es Wissenschaftler der Universität Bielefeld aus acht verschiedenen Forschungsgruppen der Fachrichtungen Informatik, Biologie, Physik und Ingenieurswissenschaften. Im Rahmen eines rund 740.000 Euro teuren Großprojekts am Exzellenzcluster Kognitive Interaktionstechnologie (CITEC) wollten sie einen Roboter dazu bringen, selbstständig ein Gelände mit Hindernissen zu überwinden und sich flexibel auf die jeweilige Situation einzustellen.
Jedes der sechs Beine lässt sich unabhängig bewegen
Das haben sie geschafft: Hector läuft. Seinem tierischen Vorbild entsprechend kann er jedes seiner sechs Beine einzeln bewegen und versetzen. Seine drei passiv-elastischen Gelenke pro Bein ermöglichen es ihm, auch auf unebenem Gelände zu laufen. Damit der effektive Gang mit einem sicheren Stand einhergeht, steht jede Extremität mit den anderen fünf in Kontakt und gleicht aktuelle und kommende Bewegungen ab. So wird verhindert, dass plötzlich zu viele Beine gleichzeitig in der Luft sind und Hector umfällt oder dass an verschiedenen Beinen gegenteilige Aktionen gleichzeitig ablaufen.
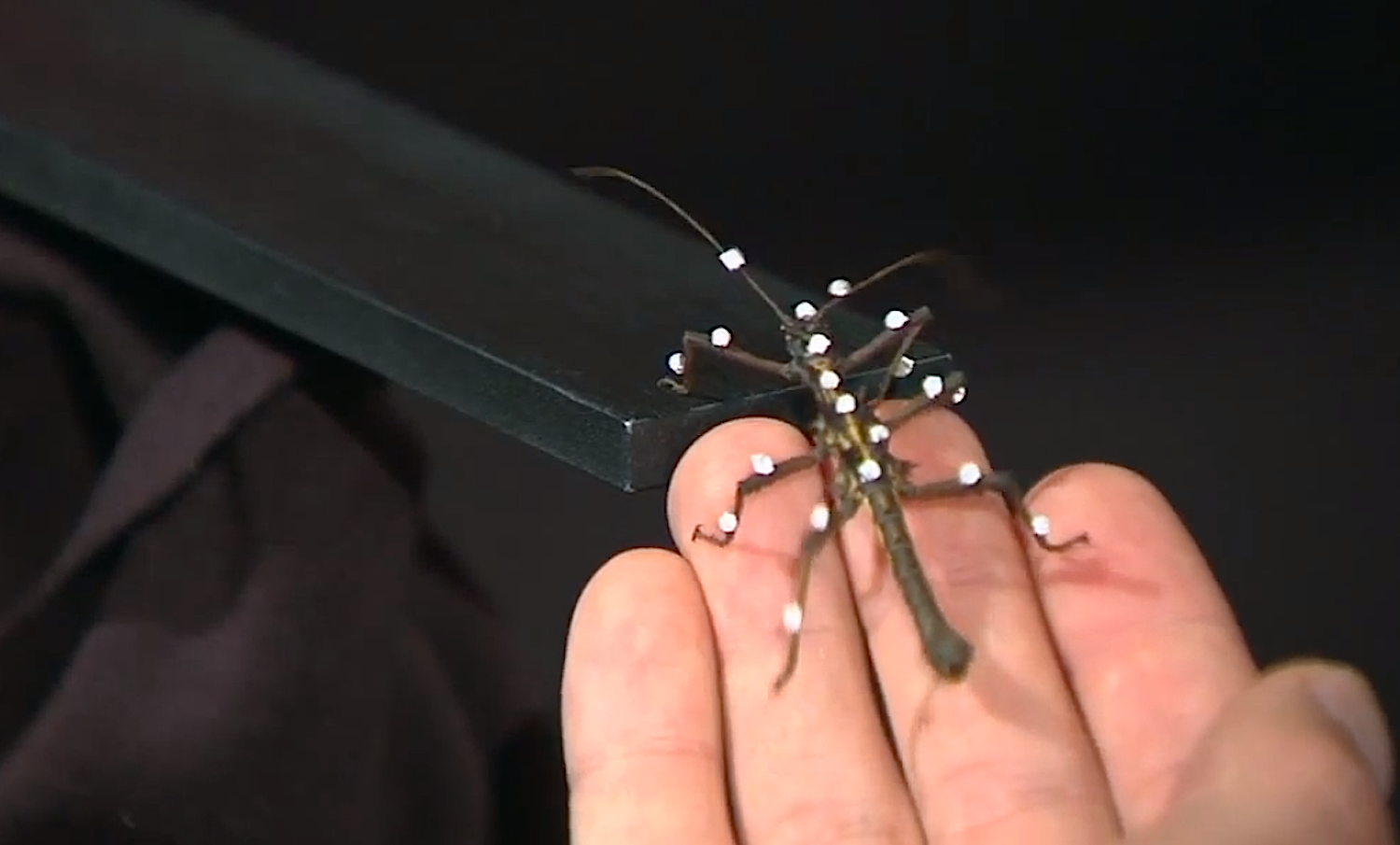
Vorbild für Hector ist eine Stabheuschrecke. Dieser haben die Wissenschaftler Locatorpunkte angeklebt, um ihre Bewegungen im Computer zu analysieren.
Quelle: Universität Bielefeld
Das erreichen die Wissenschaftler durch eine Zusammenführung der Sensordaten im Innern von Hector. Damit ermöglichen sie ihrem mechanischen Geschöpf aber noch etwas anderes: Hector stellt sich beim Laufen auf Hindernisse in seinem Weg ein. Stößt eins seiner Beine an ein Hindernis, ermittelt sein elektronisches Gehirn die optimale Aktion, um es zu umgehen. In der Regel hebt der Roboter das betreffende Bein beim neuerlichen Versuch ein wenig höher an als zuvor. Er klettert somit per Versuch und Irrtum – reflexartig wie ein echtes Lebewesen und anders als die meisten anderen Roboter.
Dass Hector nach dem Vorbild einer Stabheuschrecke konstruiert wurde, ist kein Zufall: Diese Tiere sind in der Bionik sehr beliebt. Ihre sechs Beine sind annähernd gleich gebaut, außerdem haben sie keine Flügel und können nicht springen – das heißt, sie müssen jedes Hindernis laufend bewältigen. Genau das tun sie auch, langsam und zielstrebig, durch ihre elastischen Gelenke in den sechs Beinchen sicher in fast jedem Gelände.
Als Nächstes lernt Hector sehen und tasten
Mit dem derzeitigen Erscheinungsbild von Hector ist das Ende der Fahnenstange aber noch nicht erreicht, die Bielefelder haben noch weitere Pläne für ihr Baby: Als Nächstes soll es sehen und tasten lernen. Dafür wird das mechanische Rieseninsekt am Vordersegment mit Fernsensoren ausgestattet. Einen Prototyp mit zwei Tastfühlern und zwei seitlichen Kameras gibt es bereits. Wie auch das Laufsystem sind das Sehsystem und die Fühler eng an das tierische Vorbild angelehnt.
Die Forscher haben weitere Pläne für Hector: Als Nächstes soll er sehen und tasten lernen. Sie haben bereits einen Prototypen mit Tastfühlern und Kameras gebaut.
Quelle: Universität Bielefeld
Die große Herausforderung für die Wissenschaftler wird es nun sein, die Wahrnehmung dieses Kopfteils mit der bisherigen Sensorik für die Körperhaltung und Gelenkregelung zu verbinden. Dafür sei Hector die ideale Forschungsplattform, betonen sie. Damit das mechanische Insekt bei den Versuchen nicht zu schnell abnutzt, haben die Forscher übrigens einen Pixel-Bruder ihres Roboters entwickelt. Innerhalb eines extra programmierten Simulators kann Hectors virtueller Zwilling tage- und wochenlang krabbeln, klettern, stürzen und anstoßen, ohne dass die Mechanik leidet.

Ein Beitrag von:








