Roboter-Känguru gewinnt bei jedem Sprung Energie zurück
Die Maschine sieht aus wie ein Känguru, sie springt auch so und ist gleichzeitig einer der Stars der Hannover Messe. Mit dem bionischen Känguru ist der Esslinger Firma Festo ein Maschinenwesen gelungen, das ganz viel Hightech unter der Haut verbirgt. So kann das Gerät wie sein natürliches Vorbild bei jedem Sprung Energie aus der Landephase zwischenspeichern und für den nächsten Sprung wieder einsetzen.

Ein Star auf der Hannover Messe: das bionische Känguru BionicKangoo des Maschinenbauers Festo.
Foto: Hannover Messe
Sie sind immer spektakulär, die bionischen Maschinen der Esslinger Firma Festo. Mal konstruieren die Ingenieure Unterwassermaschinen in Quallenform, mal fliegen sie wie Insekten durch die Luft. Jetzt beeindrucken die Festo-Entwickler mit einem BionicKangaroo. Das Maschinenwesen von einem Meter Größe und 7 Kilogramm Gewicht kann erstaunlich große Sprünge machen: BionicKangoo kann mit einem Hüpfer 80 Zentimeter weit springen und hebt dabei 40 Zentimeter vom Boden ab. Der Nachbau des australischen Wappentiers demonstriert dabei auf kleinsten Raum die Effizienz des Originals. Genau wie das echte Känguru kann das BionicKangoo die Energie zurückgewinnen, speichern und effizient im nächsten Sprung wieder einbringen.
Achillessehne als elastisches Federelement aus Gummi
Beim echten Känguru übernimmt die Achillessehne die Funktion des Energiespeichers, die deshalb auch besonders ausgeprägt ist. „Die Funktion der natürlichen Achillessehne realisieren wir beim künstlichen Känguru mithilfe eines elastischen Federelements aus Gummi“, erläutert Projektleiter Dr.-Ing. Heinrich Frontzek.
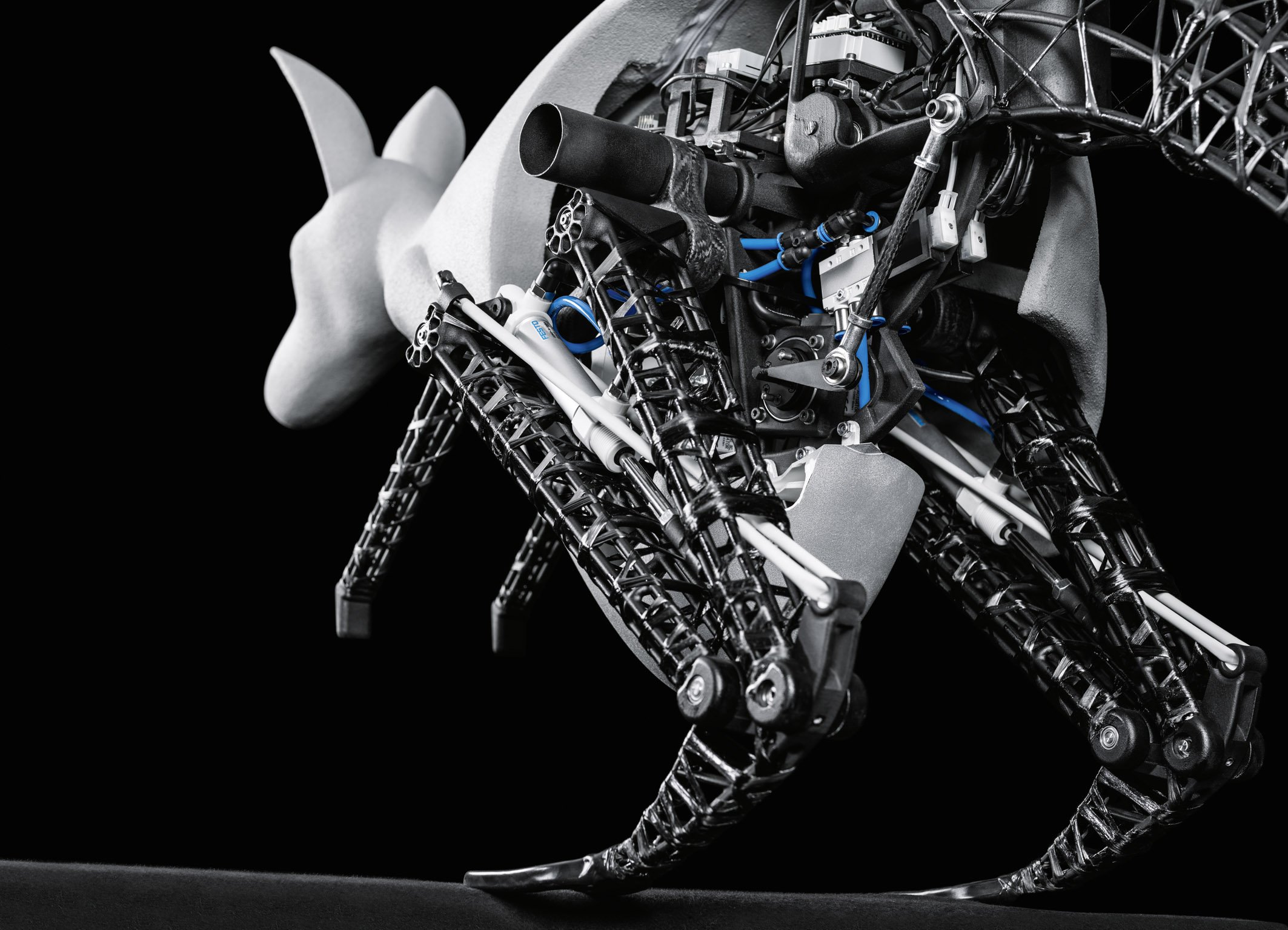
Ein elastisches Federelement aus Gummi übernimmt beim BionicKangoo die Funktion der Achillessehne des echten Kängurus. Das Federelement nimmt die kinetische Energie der Landung auf, um sie beim Absprung wieder freizugeben. Das Federelement ist am hinteren Teil des Fußes und parallel zum Pneumatikzylinder am Kniegelenk befestigt.
Quelle: Festo
Es ist am hinteren Teil des Fußes und parallel zum Pneumatikzylinder am Kniegelenk befestigt. Die künstliche Sehne dämpft den Sprung, nimmt gleichzeitig die kinetische Energie auf und setzt sie für den nächsten Sprung wieder frei.
Hochdruckspeicher liefert 8 bar Versorgungsdruck
Alle Komponenten sind auf kleinstmöglichen Raum optimal ausgelegt, vernetzt und geregelt. Die Gehäuseelemente sind aus Schaum gefräst, der Bewegungsapparat aus lasergesinterten Bauteilen gefertigt, die mit Karbon verstärkt sind. Für die mobile Energieversorgung nutzt das Maschinenwesen entweder einen kleinen Kompressor oder einen Hochdruckspeicher, der es auf 8 bar Versorgungsdruck bringt. Als elektrischer Energiespeicher dienen Lithium-Ionen-Akkus.

40 Zentimeter hoch springt das bionische Känguru.
Quelle: Hannover Messe
Das BionicKangoo lässt sich mit einem speziellen Armband über Gesten steuern. Dieses erkennt dabei die Muskelaktivitäten seines Bedieners. Ein Lagesensor im Band erfasst die Bewegung des Arms. Das Armband sendet diese erfassten Signale über Bluetooth bis zu einer Entfernung von 50 Metern an die kompakte Steuerung des künstlichen Kängurus. Sofort tritt das Maschinenwesen in Interaktion mit seinem Bediener.
Im Stand verfügt das Känguru über eine stabile Dreipunktauflage
Das BionicKangoo ist höchste Ingenieurskunst. Im Stand berührt das hüpfende Maschinenwesen mit beiden Füßen und dem Schwanz den Boden und verfügt so über eine stabile Dreipunktauflage. Auch beim Sprung ist es der Schwanz, der über die Eleganz entscheidet, denn er sorgt für die nötige Balance. Ein elektrischer Servomotor regelt dafür gezielt seinen Anstellwinkel und sorgt so für die entsprechende Ausgleichsbewegung. Das ist schlau, denn so kompensiert das BionicKangoo die störende Gegenbewegung seiner Beine. Diese müssen für die Landung nach vorne geholt werden. Das regeln zwei elektrische Servomotoren, die zwischen Hüfte und Oberschenkel sitzen, so dass sie vorwärts und rückwärts bewegt werden können.
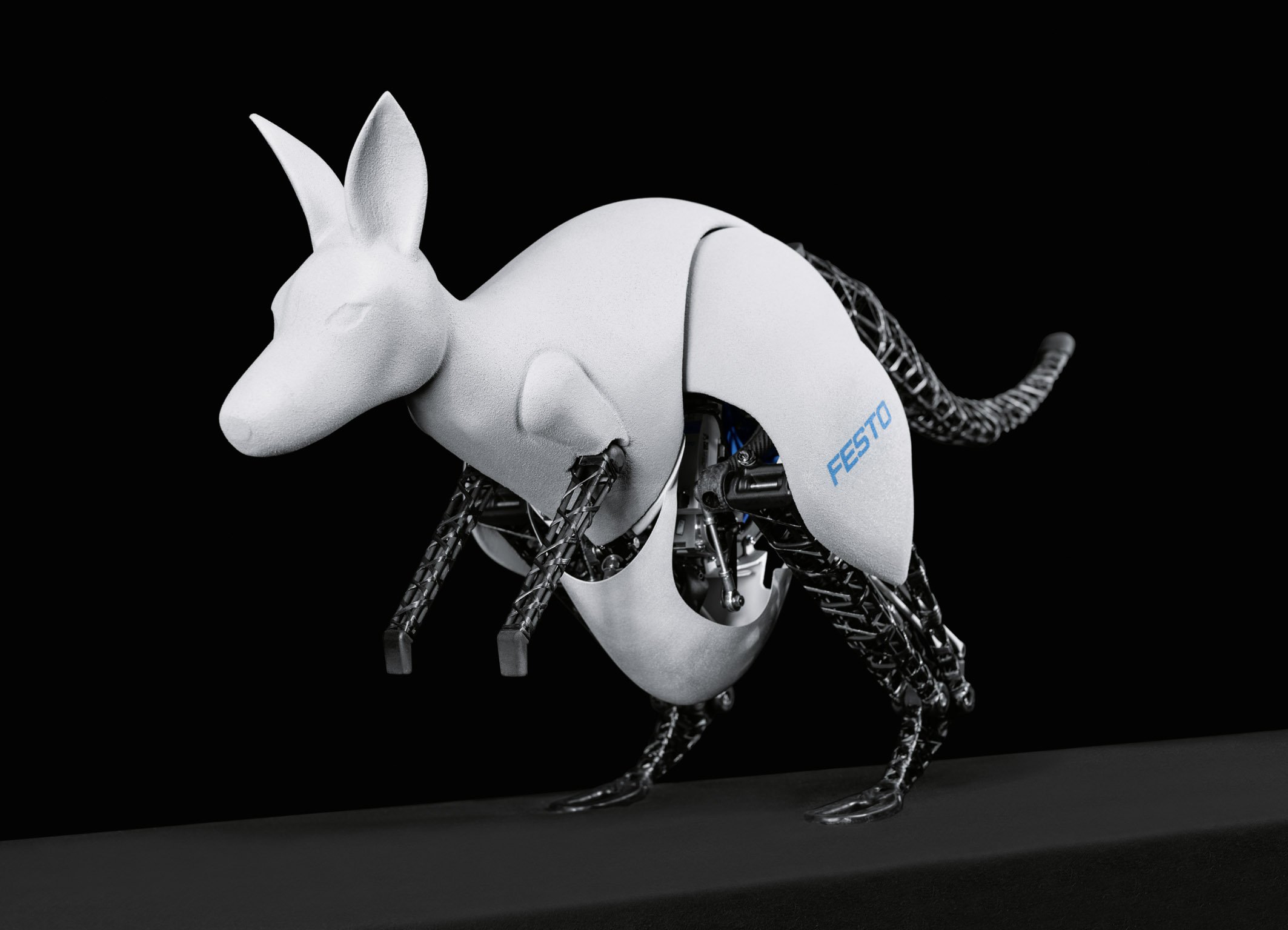
BionicKangoo von Festo kann mit einem Hüpfer 80 Zentimeter weit springen und hebt dabei 40 Zentimeter vom Boden ab.
Quelle: Festo

Der Bewegungsapparat des künstlichen Kängurus muss exakt aufeinander abgestimmt sein. Denn wie das Original nimmt das Maschinenwesen die Restenergie aus dem vorhergehenden Sprung mit in den nächsten. Vor dem ersten Sprung wird die elastische Sehne pneumatisch vorgespannt. Die Sprungphase beginnt damit, dass das BionicKangoo seinen Schwerpunkt nach vorne verlagert und so zu kippen beginnt. Sobald ein definierter Winkel bei entsprechender Winkelgeschwindigkeit erreicht ist, werden die pneumatischen Zylinder betätigt. Im Bruchteil einer Sekunde wird die Energie aus der vorgespannten Sehne frei und das Känguru springt los.
Oberkörper bleibt nahezu waagerecht
Genau wie sein australisches Vorbild zieht Festos Maschinenwesen in der Flugphase seine Beine nach vorne. Dabei entsteht ein Drehmoment an der Hüfte, den BionicKangoo mit einer Schwanzbewegung gekonnt ausgleicht. Dadurch bleibt der Oberkörper nahezu waagerecht. Bei der Landung wird die kinetische Energie des Sprunges in potentielle Energie umgewandelt, indem die Sehne wieder gespannt wird. So ist die Energie wieder im System des Kängurus gespeichert und steht bereit für den folgenden Hüpfer.
Die Landephase ist dabei der entscheidende Vorgang für die Energierückgewinnung. Sie ist verantwortlich für das effiziente Sprungverhalten des künstlichen Kängurus. Während der Landephase bewegt sich der Schwanz in Richtung Boden und damit wieder in seine Ausgangslage zurück.
Springt BionicKangoo dann weiter, leitet es die gespeicherte Energie des vorherigen Sprungs direkt in den nächsten Sprung ein, indem im exakt richtigen Moment die Ventile schalten. So kann das Maschinenwesen mehrere Sprünge hintereinander zurücklegen, immer etwa 80 Zentimeter weit und 40 Zentimeter hoch. Soll das künstliche Springtier zum Stillstand kommen, muss es möglichst viel Energie absorbieren. Dazu werden die pneumatischen Aktoren entsprechend geschaltet und die Sehne wird wieder aktiv vorgespannt.
BionicKangoo ist Neuzugang im bionischen Festo-Zoo
Für die Stabilität bei Sprung und Landung sorgen das Condition Monitoring sowie die eingesetzte Steuerungs- und Regelungstechnik von Festo. „Für uns ist es der erneute Beweis, dass pneumatische und elektrische Antriebstechnik effizient und intelligent zu einem hoch dynamischen System kombiniert werden können“, betont der Festo-Vorstandsvorsitzende Dr. Eberhard Veit. Energierückgewinnung, Selbstorganisation, neue Antriebskonzepte und Positionierungssysteme im Zusammenspiel zu zeigen, das waren die Hintergedanken bei der Entwicklung de BionicKangoos. Inzwischen könnte Festo eigentlich einen Zoo eröffnen. Neben dem Känguru gäbe es da auch Quallen, Möwen, Libellen und Pinguine.
Ein Beitrag von:








