Roboter putzt Waschbecken durch Nachahmung
Forschende der TU Wien wählen einen neuen Ansatz, um Robotern das Putzen, Schleifen, Polieren oder Schweißen beizubringen.
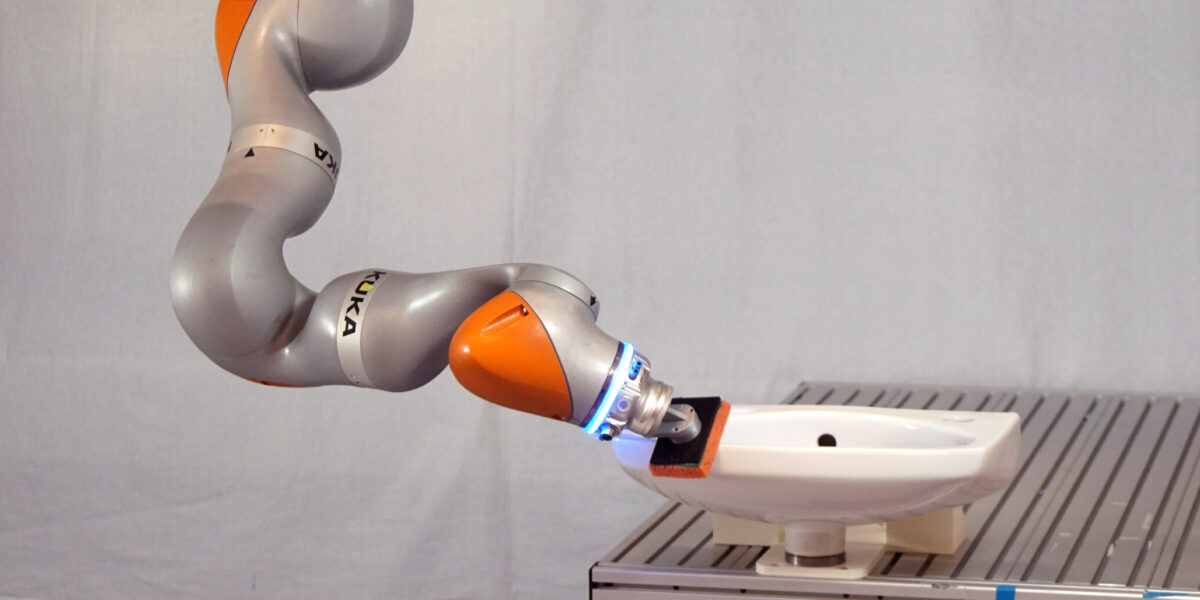
Einmal vorgemacht, putzt der Roboter das Waschbecken eigenständig. Durch Nachahmung kann er auch andere Tätigkeiten wie Polieren, Schleifen oder Schweißen lernen.
Foto: TU Wien
Roboter sollen uns unangenehme, immer wieder vorkommende Tätigkeiten abnehmen. Tätigkeiten wie das Putzen von Badezimmern stellen jedoch besondere Herausforderungen dar, da sie komplexe Bewegungen und präzise Kraftanwendung erfordern. Die Technische Universität (TU) Wien hat nun einen innovativen Ansatz entwickelt, bei dem ein Roboter das Putzen eines Waschbeckens durch Nachahmung erlernt – ein Verfahren, das ihm erlaubt, das Gelernte flexibel auf unterschiedliche Oberflächenformen anzuwenden.
Learning-by-Demonstration
An der TU Wien setzt das Forschungsteam auf ein sogenanntes „Learning-by-Demonstration“-Konzept. Statt komplizierte mathematische Modelle zu erstellen, wird der Roboter direkt durch Menschen trainiert. Dafür nutzt er einen speziell entwickelten, sensorbestückten Schwamm. Dieser wird vom Menschen entlang einer Waschbeckenkante geführt, wobei der Roboter Bewegungen, Winkel und Krafteinsatz genau beobachtet.
Durch wenige Demonstrationen generiert der Roboter eine Vielzahl an Daten, die ihm helfen, das Putzen korrekt auszuführen. Christian Hartl-Nesic von der Industrial Robotics-Gruppe aus Kugis Team erklärt: „Aus einigen wenigen Demonstrationen generieren wir eine Riesenmenge an Daten, die dann verarbeitet werden, damit der Roboter lernt, was richtiges Putzen eigentlich bedeutet.“
So funktioniert der Lernprozess
Ein wichtiger Bestandteil des Prozesses ist ein Schwamm mit eingebauten Kraftsensoren und Tracking-Markern. Diese Sensoren ermöglichen es dem Roboter, die spezifische Kraft zu erkennen, die für verschiedene Oberflächen und Krümmungen nötig ist. Mithilfe von Algorithmen des maschinellen Lernens werden die aufgenommenen Daten so verarbeitet, dass der Roboter die optimalen Bewegungen lernt.
Professor Andreas Kugi von der TU Wien erläutert: „Die geometrische Form eines Waschbeckens mit Kameras zu erfassen, ist relativ einfach. Aber das ist noch nicht der entscheidende Schritt. Viel schwieriger ist es, dem Roboter beizubringen: Welche Stelle der Oberfläche soll er mit welcher Art von Bewegung bearbeiten? Wie schnell? In welchem Winkel? Mit welchem Kraftaufwand?“
Nach einer kurzen Trainingsphase kann der Roboter dann eigenständig das gesamte Waschbecken reinigen und passt seine Bewegungen flexibel an die spezifische Form an.
Auf Handwerk und industrielle Produktion übertragbar
Das Wissen aus dem Waschbecken-Putzen lässt sich auf zahlreiche andere Bereiche übertragen. Aufgaben wie Schleifen, Polieren oder sogar das Auftragen von Farbe und Klebstoffen könnten ebenfalls durch Roboter mit ähnlichen Lernmethoden übernommen werden.
Gerade in handwerklichen Werkstätten oder in der industriellen Produktion eröffnen solche Roboter ganz neue Möglichkeiten. „Stellen wir uns vor, es gibt viele Werkstätten, die mit solchen Robotern Oberflächen abschleifen oder lackieren. Dann könnte man die Roboter jeweils einzeln an lokalen Daten Erfahrung sammeln lassen“, erläutert Professor Kugi.


Gemeinsames Lernen in vernetzten Werkstätten
Zukünftig könnten Roboter durch das sogenannte „Federated Learning“ voneinander lernen. So könnten Roboter verschiedener Werkstätten ihre Erfahrungen teilen, ohne dabei spezifische Werkstückdaten preiszugeben. Diese Art von gemeinschaftlichem Lernen könnte das Know-how der Roboter kontinuierlich verbessern und auf verschiedene Oberflächenbearbeitungsprozesse anwendbar machen.
Ein weiterer Meilenstein der Technologie: Die Forschung der TU Wien wurde auf der International Conference on Intelligent Robots and Systems (IROS) 2024 mit dem „Best Application Paper Award“ ausgezeichnet und als eine der bedeutendsten Innovationen des Jahres anerkannt.
Hier geht es zur Orginalpublikation
| Web-Panel: Cobot oder humanoider Roboter – wem gehört die Zukunft? |
| Leichtbauroboter, sogenannte Cobots, werden immer beliebter. Gleichzeitig kündigt sich mit humanoiden Robotern bereits eine neue Generation an Universalmaschinen an. Was Unternehmen jetzt wissen müssen, ist Thema des nächsten hochkarätigen Web-Panels der VDI nachrichten. |
| Mit dabei sind Neura-Robotics-CEO David Reger, Dominik Bösl, Professor für Wirtschaftsinformatik an der HDBW (Hochschule der Bayerischen Wirtschaft) , Synapticon-Geschäftsführer Nicolai Ensslen und Pero Mićić, Gründer und Vorstand der FutureManagementGroup. |
| Weitere Informationen zum Web-Panel am 7.11.24, 16:00 – 17:30 Uhr finden Sie hier. |
Ein Beitrag von:















