Roboter „wächst“ wie eine Pflanze und kann sich drehen
Amerikanische Wissenschaftler haben einen besonders flexiblen Roboter entwickelt. Er kann seine Gestalt verändern und soll in der Lage sein, sich durch enge Passagen in einer Fabrik zu navigieren oder Gegenstände zu greifen, die hinter anderen Objekten liegen.
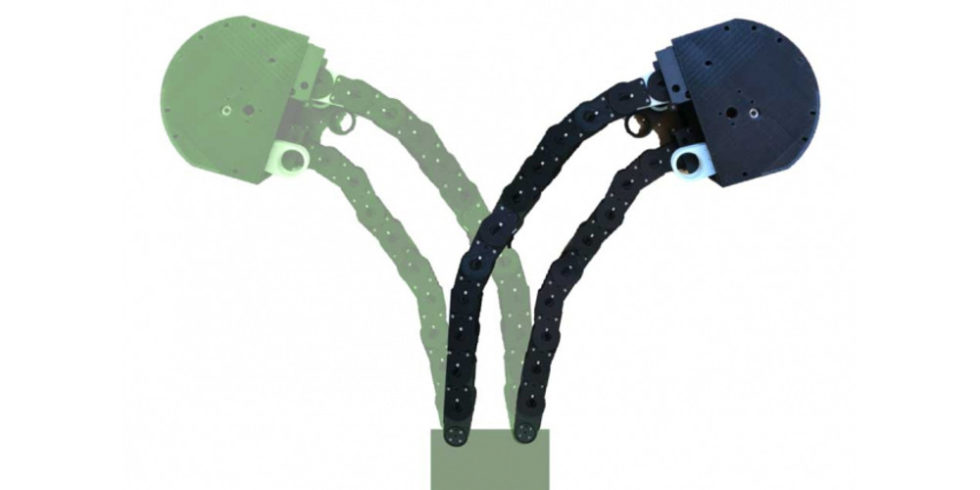
Die Grundkonstruktion besteht aus einzelnen Kettengliedern, die unten im Kasten arretiert werden. Bei Bedarf sind gebogene Formen möglich.
Foto: MIT
Roboter gehören in viele Produktionshallen zum Alltag. Viele sind fest an einem Platz installiert und führen permanent dieselben Bewegungen aus. Diese Industrieroboter lassen sich verhältnismäßig leicht bauen und programmieren. Schwieriger wird es, wenn Roboter sich frei über eine Fläche bewegen und dort individuelle Aufgaben ausführen sollen. Dabei sind sie jedoch häufig Herausforderungen ausgesetzt, die sie nur schwer bewältigen können. Ingenieure am Massachusetts Institute of Technology (MIT) haben dafür eine Lösung entwickelt. Ihr Roboter soll seine Gliedmaßen anpassen können.
Im Getriebekasten werden die Kettenglieder arretiert
Pflanzen machen es vor. Sie wachsen nämlich, indem sie Nährstoffe in flüssiger Form bis zum äußersten Ende der jeweiligen Triebe transportieren. Dort wandelt die Pflanze die Nährstoffe in festes Material um und verlängert auf diese Weise den Trieb Stück für Stück von innen heraus. Die Forscher am MIT haben genau dieses Prinzip auf ein neues Roboter-Modell übertragen. Im Grunde besteht es aus einem Getriebe, das eine lose Kette in einen Kasten zieht. Dort dreht sich die Kette um eine Winde, die sie in einen zweiten Satz von Motoren leitet. Diese sind so programmiert, dass sie bestimmte Einheiten in der Kette mit ihren benachbarten Einheiten verriegeln, sodass ein starres Glied entsteht. Die Verriegelung kann zudem an unterschiedlichen Stellen erfolgen, um etwa einen gebogenen Greifarm zu formen.
Dieser kettenförmige Aufbau soll auf der einen Seite dazu führen, dass der Roboter flexibel „wachsen“ kann, bis das Ende der Kette erreicht ist. Auf der anderen Seite ist die Konstruktion niemals völlig starr. Deswegen soll es möglich sein, sie zu drehen. Gleichzeitig versprechen die Wissenschaftler, dass ihr Roboter durchaus schwere Lasten tragen kann, und steif genug ist, um ausreichend Kraft auszuüben, wenn er beispielsweise einen Deckel abschrauben soll. Die Kette besteht übrigens aus Kunststoffelementen, die vom 3D-Drucker gefertigt werden.
Roboter ist steif genug für kraftvolle Bewegungen
„Stellen Sie sich vor, Sie möchten, dass ein Roboter das Öl in Ihrem Auto wechselt“, sagt Harry Asada, Professor für Maschinenbau am MIT. „Nachdem er die Motorhaube geöffnet hat, muss er flexibel genug sein, um scharfe Kurven nach links und rechts Richtung Ölfilter zu nehmen. Dann muss er stark genug sein, um den Ölfilterdeckel aufzudrehen.“ Zu all diesen Schritten soll der neue Roboter in der Lage sein. Hat er seine Aufgabe erledigt, kann er zudem die Kette wieder einziehen und erneut ausfahren – in ihrer Länge und Form angepasst an die nächste Herausforderung.
Für die wird er übrigens oftmals zusätzliches Werkzeug benötigen. Auch das sehen die Forscher nicht als Problem an. Sie planen, Greifer, Kameras oder spezielle Sensoren am Getriebekasten des Roboters zu befestigen, die dieser dann verwenden könne, um sich beispielsweise durch das Antriebssystem eines Flugzeugs zu schlängeln und eine lose Schraube festzuziehen. Oder der Roboter greift ein Produkt weiter hinten aus einem Regal, ohne die vorderen Objekte zu berühren – weil das Kettenglied in einem großen Bogen ausfahren kann. In ersten Experimenten konnten die Forscher ihren Roboter bereits so programmieren, dass er sich um ein Hindernis dreht, während er sich ausdehnt oder aus seiner Basis herauswächst.
Konzept soll bei komplexen Aufgaben helfen
Den Ansatz zum neuen Roboter hat Asada im Rahmen spezieller Forschungen entwickelt: Er versucht, das sogenannte „Last One-Foot-Problems“ zu lösen. Der Begriff bezieht sich auf eine Situation, die bei der Arbeit mit Robotern häufig auftritt. Erst bewegen sich die Geräte in einer Umgebung mit relativ viel Platz, doch am Ende – den letzten Schritt – müssen sie durch engere Bereiche navigieren oder eine komplexere Aufgabe bewältigen.
Ingenieure versuchen mit unterschiedlichen Konzepten, dieses „Last One-Foot-Problem“ in den Griff zu bekommen. Ein Beispiel sind Roboter aus weichen, ballonartigen Materialien, die sich regelrecht durch Spalten quetschen können. Laut Asada gelangten sie durchaus an ihr Ziel, könnten dort jedoch nur in einem sehr begrenzten Maße Tätigkeiten ausführen, weil sie nicht fest genug sind, um beispielsweise Greifbewegungen mit dem erforderlichen Kraftaufwand durchzuführen.
Weitere Beiträge zur Robotik:
Ein Beitrag von:















