Roboterschwarm aus Deutschland erkundet tiefsten Canyon auf dem Mars
An der Suche nach Leben auf dem Mars beteiligt sich demnächst auch ein Schwarm von Robotern, die aktuell deutsche Forscher entwickeln. Sie sollen einen 7000 Meter tiefen Graben auf dem Mars erkunden, in dem Wasser vermutet wird. Dort könnte sich Leben entwickelt haben. Die deutschen Schwarmroboter sind dabei echte Alleskönner.

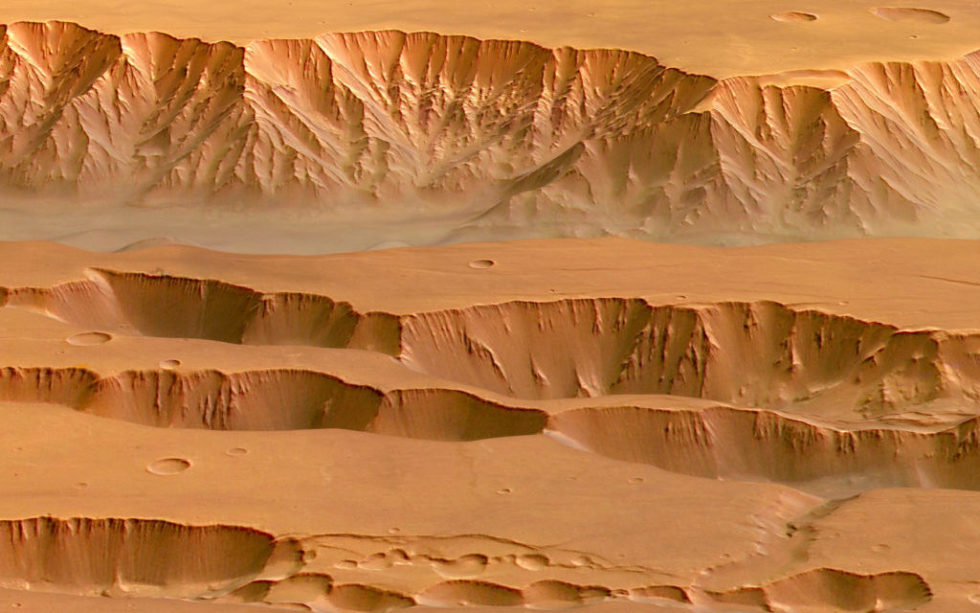

Das Valles Marineris auf dem Mars ähnelt dem Grand Canyon, ist aber mit 7000 Metern siebenmal so tief. Das zerklüftete Tal ist das größte Grabenbruchsystem unseres Sonnensystems. Forscher vermuten in dem Canyon Wasservorkommen. Und da die lebensbedohliche ultraviolette Strahlung nicht bis in die Tiefe des Tals eindringen kann, ist das ein Ort, an dem es Leben geben könnte.
Doch wie soll man in diesen steilwandigen Graben hineinkommen, wenn nicht ein Bergsteiger vom Kaliber eines Reinhold Messner vor Ort ist? Roboter sollen es richten, und davon gleich ganz viele. Die einen können fliegen, die anderen rollen wie ein Mars-Rover.
Charlie klettert fast wie Reinhold Messner
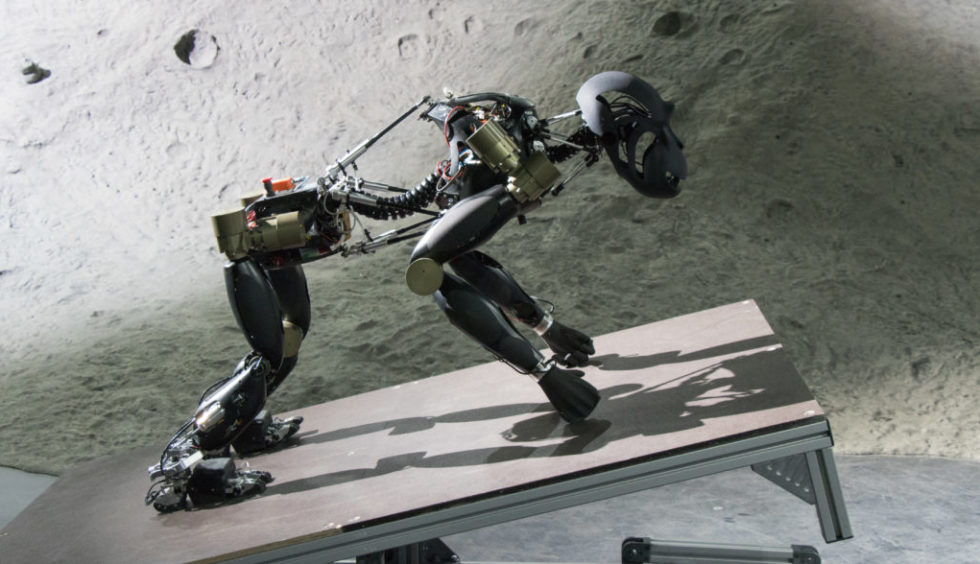
Doch das allein reicht noch nicht. Die Roboter müssen als Schwarm auch optimal zusammen arbeiten, um den Canyon zu erkunden. Solch ein Roboterschwarm gab es bislang noch nicht. Inzwischen haben das Deutsche Forschungszentrum für Künstliche Intelligenz (DFKI) in Kaiserslautern und das Deutsche Zentrum für Luft- und Raumfahrt (DLR) einen menschenähnlichen Roboter entwickelt, der selbst unter widrigsten Umständen ohne Bergausrüstung stabil auf seinen Beinen steht und klettern kann wie ein junger Gott – notfalls auf allen Vieren.
Er basiert auf „Charlie“, einem Laufroboter, den Forscher des DFKI entwickelt haben. Für die Felsen, Schluchten und Steilhänge, die es auf dem Mars zu bewältigen gilt, wird er allerdings noch aufgerüstet. Dabei steuern Forscher des Lehrstuhls für Medientechnik der TU München und der NavVis GmbH ihr Wissen bei, ein Münchner Unternehmen, das auf die Indoor-Navigation spezialisiert ist.
Optimaler Untergrund für jedes Roboterbein
Navigation ist dabei ein entscheidender Faktor für den Marsroboter. Zudem muss er sich mit seinen fliegenden und rollenden Kollegen abstimmen. Dazu entwickeln die Forscher eine übergeordnete Netzwerkintelligenz, die je nach Terrain und Können der Roboter entscheidet, wer aus dem Schwarm jeweils eingesetzt wird.
Charlie ist ein Leichtgewicht, wichtig für eine Marsmission, bei der jedes Kilogramm mit tausenden Euro Transportkosten zu Buche schlägt. Er ist schon von Haus aus mit taktilen Sensoren ausgestattet, die die Bodenbedingungen erfassen, also Unebenheiten, Steigungen und Gefälle erspüren.
Die Mars-Version des Roboters verfügt über einen „adaptiven Footplacement-Algorithmus“, also ein Rechenverfahren, mit dem sich unter Zuhilfenahme einer lokalen Karte bei jedem Schritt für jedes Bein ein optimaler Fußkontaktpunkt finden lässt, sodass den Roboter nichts umwerfen kann. Selbst wenn der Untergrund anders ist als erwartet, etwa nachgiebig statt fest, werden die neuen Werte in Echtzeit auf die Laufsteuerung übertragen. So ist er stets in der Lage, seine Wanderung oder Klettertour stabil fortzusetzen.

Test in der Weltraumtesthalle
Wann der Schwarm auf den Mars katapultiert wird, ist noch offen. Vorerst wird der Schwarm in der Weltraumexplorationshalle des DFKI in Bremen getestet. In der 288 Quadratmeter großen Halle ist eine zerklüftete Landschaft installiert, deren Beschaffenheit der Oberfläche eines Kraters am Südpol des Mondes nachempfunden wurde. Das ist zwar keine Valles-Marineris-Dimension, für Tests reicht es jedoch allemal.
Ein Beitrag von:

















