Robotherprothese schenkt menschlicher Hand zwei weitere Finger
Der Träger muss die Prothese nur auf sein Handgelenk setzen und einen Sensorhandschuh anziehen. Und schon hat er eine Hand mit sieben Fingern. Die Entwicklung der Ingenieure des Massachusetts Institutes of Technology (MIT) soll besonders behinderten Menschen den Alltag erleichtern.

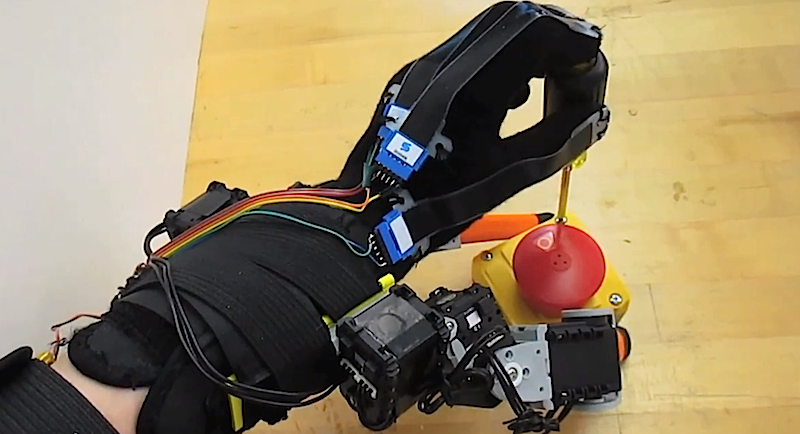
Die Roboterprothese des MIT: Der Sensorhandschuh überträgt die Bewegungen der natürlichen Finger an die Prothese. Die künstlichen Finger bewegen sich dann synchron.
Foto: MIT
Das Massachusetts Institute of Technology (MIT), eine der technischen Elite-Hochschulen in den USA, wartet mit einem kleinen Roboter auf, der am Handgelenk befestigt wird und die Fähigkeiten der menschlichen Hand erhöht: Der Roboter verleiht dem menschlichen Träger zwei zusätzliche Finger. Einer der Roboterfinger steht neben dem Daumen, der zweite neben dem kleinen Finger.
Sensorhandschuh steuert Roboterprothese
Bemerkenswert ist dabei, dass sich die künstlichen Finger dank neuer Steueralgorithmen ganz im Übereinklang mit den natürlichen Fingern bewegen. Nötig ist lediglich ein Sensorhandschuh, der die Bewegungen der Finger überträgt. „Es ist nicht erforderlich, den Roboter zu steuern. Vielmehr reicht es, die eigenen Finger zu bewegen“, erklärt Professor Harry Asada vom Department of Mechanical Engineering des MIT.

Flaschen öffnen mit einer Hand ist kein Problem: Die Roboterfinger halten die Flasche, die natürlichen Finger schrauben den Deckel ab.
Quelle: MIT
„Die Roboterfinger passen sich dem an und unterstützen die menschlichen Finger bei der jeweiligen Aufgabe“, so Asada. Wer eine Weile mit diesem Roboter am Handgelenk arbeite, empfinde ihn schließlich als recht natürlich. „Wie ein Werkzeug, das man lange benutzt hat, werden nun auch die Roboterfinger zur Selbstverständlichkeit für den Träger.”
Künstliche Finger erleichtern behinderten Menschen den Alltag
Die Erfindung soll unter anderem behinderten Menschen zugutekommen, deren Fingerbeweglichkeit stark eingeschränkt ist. Mit Hilfe des Roboters können sie wieder Flaschen und Dosen öffnen und auch schwerere Gegenstände heben oder aus Regalen ziehen. Menschen mit gesunden Händen können eine Aufgabe, die sonst zwei Hände erfordert, mit einer Hand erledigen. Die Kraft der synthetischen Finger entspricht genau jener Kraft, die die Finger gesunder Menschen besitzen.
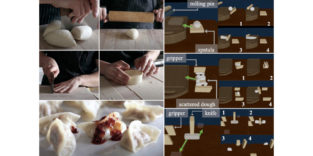
Auch in der Industrie könnte die Roboterprothese zum Einsatz kommen. Arbeitsschritte wie diese sind dann mit einer Hand machbar.
Quelle: MIT
Die MIT-Forscher haben zu Beginn der Entwicklung der Algorithmen die Bewegungen menschlicher Finger bei einer Vielfalt von Aufgabenstellungen beobachtet und analysiert. Von der Weiterentwicklung dieser Algorithmen versprechen sie sich eine deutliche Verbesserung der Mensch-Roboter-Interaktion.

Ein Beitrag von: