Volkswagen und Siemens bringen Industrierobotern sanfte Bewegungsabläufe bei
Aus der Automobilindustrie sind Industrieroboter nicht mehr wegzudenken: Sie schweißen, kleben, und verbinden – und sind dabei wegen ihrer ruckartigen Bewegungen wahre Stromfresser. Volkswagen, Siemens und die Fraunhofer-Gesellschaft tüfteln deswegen an einer neuen Software. Sie soll Robotern sanfte und stromsparende Bewegungen beibringen.
Roboterarme könnten in Zukunft durch ergonomischere Bewegungen bis zu 50 Prozent weniger Strom verbrauchen. Derzeit sind besonders die ruckartigen Bewegungen beim Beschleunigen und Abbremsen energieintensiv.
Foto: Siemens
Wer einmal in einem Automobilwerk den unzähligen Robotern am Band zugeschaut hat, denkt beinahe unwillkürlich an eine Ballettchoreografie: Wie eine leichte Feder hebt der gigantische Arm eines Roboters eine Autotür an, schwenkt blitzschnell zum Band herum und setzt sie mit ruckartigen Bewegungen millimetergenau an die Karosserie. Weitere Arme rasen heran, verfehlen sich dabei nur um wenige Zentimeter. Funken sprühen, während die Roboter die Scharniere der Türe an den Rahmen schweißen. Wie auf ein Kommando des Choreografen ziehen sie sich rasch zurück, während die Karosserie am Band weiterfährt zur nächsten Station der Autoproduktion.
Ruckartige Bewegungen machen Industrieroboter zu Stromfressern
Tausende Industrieroboter verrichten in einer Fabrik heute rund um die Uhr ihren Dienst. Sie brauchen, anders als Balletttänzer, keine Pause. Ihr Energiehunger ist jedoch schier unersättlich: Ein Automobilwerk mit einer Tagesproduktion von rund 1000 Fahrzeugen benötigt einige Hundert Gigawattstunden Strom pro Jahr. Das entspricht dem Stromverbrauch einer mittelgroßen Stadt. Dabei entfallen etwa zwei Drittel auf Elektromotoren, die zum Beispiel die Montagebänder antreiben, die Maschinen oder auch Pumpen bewegen oder in den Gelenken der Roboter sitzen und für Bewegung sorgen.
Eine Forscherallianz unter der Federführung von Volkswagen, Siemens und der Fraunhofer-Gesellschaft hat sich jetzt diese gigantische Stromfresserei vorgenommen. Ziel der Innovationsallianz Green Carbody Technologies (Innocat) ist es, den Bewegungsablauf mit Hilfe von effizienten Softwarelösungen so zu optimieren, dass er mit deutlich geringerem Energieeinsatz realisiert werden kann.
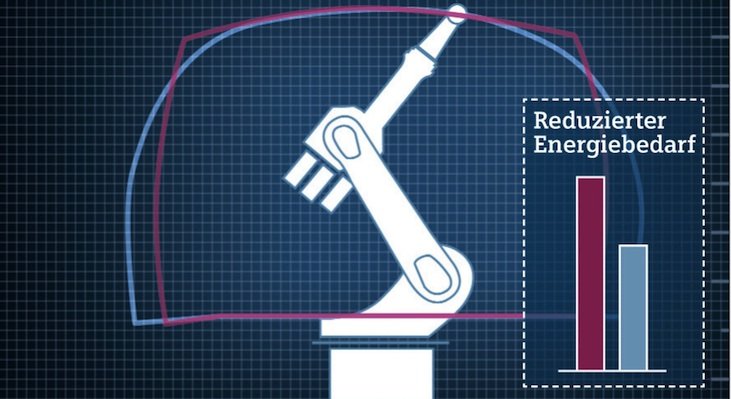
Die lila Linie beschreibt eine Bewegungsbahn, die durch einen abrupten Richtungswechsel gekennzeichnet und deswegen energieintensiv ist. Die Software soll hingegen sanfte Bewegungsbahnen (blau) ermöglichen.
Quelle: Siemens
„Derzeit arbeitet kaum ein Industrieroboter bewegungsoptimiert“, urteilt Matthias Frische, Integration Manager bei Siemens Industry und Teilprojektleiter bei Innocat. „Die ruckartigen Bewegungen verursachen Lastspitzen im Energieverbrauch und belasten die Mechanik.“ Das Problem: Bisher werden die Bewegungsbahnen der Roboter in Produktionsstraßen meist manuell programmiert. Steht ein Richtungswechsel an, wird abgebremst, gedreht und wieder beschleunigt. Es liegt auf der Hand, dass eine solche Bewegungsstrategie jede Menge Energie verschlingt.
Simulationsmodell berechnet energiesparende Bewegungsbahnen
Die Innocat-Forscher haben jetzt nach dreijähriger Forschungsarbeit ein Simulationsmodell entwickelt, das optimale Bahnkurven für die Roboter ohne abrupte Richtungswechsel errechnet. Besonders bemerkenswert: Kein Roboter muss ausgetauscht werden, da lediglich der Bewegungsablauf verbessert wird. „Stellen Sie sich zum Vergleich einen Ballettkurs vor“, empfiehlt Frische. „Nach einiger Zeit lernt der gleiche Körper, sich fließender und effizienter zu bewegen.“
Im Labor wurde der Energiebedarf eines typischen Roboters für die verschiedenen Aufgaben analysiert und in ein Simulationsmodell überführt. Nach jeder Messung passten die Forscher verschiedene Parameter an und ermittelten so Schritt für Schritt die Einstellung mit dem größten Einsparpotential. „Wenn ein Mensch eine schwere Last bewegt, achtet er intuitiv auf möglichst ergonomische Bewegungen. Analog dazu berechnet das Simulationsmodell kinetisch optimierte, kräftesparende Bewegungsbahnen für Roboter“, erläutert Frische. „Diese so berechnete Bahn kann man mit einer Ideallinie vergleichen, auf der ein Rennwagen durch eine Kurve fährt.“
50 Prozent weniger Stromverbrauch sind möglich
Die optimierten Bahnen ergaben in Labortests Stromersparnisse zwischen 10 und 50 Prozent. „Die runderen Bewegungen senken zudem die mechanische Belastung der Roboter, also auch die Wartungs- und Instandhaltungskosten sowie die Stillstandzeiten“, sagt Frische. Diese erfolgsversprechenden Laborergebnisse durchlaufen derzeit den Praxistest. Denn die einzelnen Stationen einer robotergestützten Fertigung müssen wie Zahnräder in einem Uhrwerk ineinander greifen. Sonst droht Kollaps und Stillstand. Die Messwerte des Praxistests zeigten: Auch unter realen Produktionsbedingungen können Energieeinsparungen von bis zu 50 Prozent erreicht werden.

Im Labor experimentieren die Forscher mit Bewegungsbahnen für Roboterarme, die besonders wenig Strom verbrauchen.
Quelle: Siemens

Nun geht Innocat in Phase zwei: Die Ingenieure testen und verbessern ein Softwaremodul, das den Energieverbrauch eines vorgegebenen Bewegungsablaufes automatisch optimiert. Dazu legt der Programmierer zunächst die Positionen fest, die ein Roboter ansteuern muss – im Karosseriebau beispielsweise die verschiedenen Schweißpunkte. Die Software errechnet dann in Sekundenschnelle die energetisch effizienteste Bahn zwischen zwei Punkten. Das klingt simpel. Allerdings muss die Software dabei auch beachten, dass der nötige Abstand zu all den anderen mechanischen Helfern eingehalten wird. Dazu muss die Interaktion aller Roboter aufeinander abgestimmt werden.
Verringerung des Energiebedarfs auf Knopfdruck
Eine manuelle Bahnoptimierung würde für jeden einzelnen Roboter mehrere Tage dauern. Bei tausenden Robotern in einer Autofertigung ein unverhältnismäßig hoher Aufwand. „Mit unserer Software werden wir erstmals eine energetische Bahnoptimierung ermöglichen, die sich automatisiert und damit wirtschaftlich umsetzen lässt“, freut sich Frische. Siemens plant, ein entsprechendes Modul in seine Fertigungsplanung-Software Tecnomatix aufzunehmen. „Fertigungsunternehmen können sozusagen auf Knopfdruck ihren Energiebedarf verringern, und dadurch einen Beitrag zum Umweltschutz leisten“, betont Frische. „Mit Hilfe unserer Software schreibt der Programmierer die Choreographie für das ressourcensparende Zusammenspiel der Roboter.“
Ein Beitrag von:
















