Diese Roboter bauen bald gemeinsam große Gebäude
Ein amerikanisches Forscherteam hat einen großen Fortschritt in der Entwicklung neuer Roboter gemacht. Sie arbeiten in Schwärmen zusammen und könnten sogar Objekte bauen, die größer sind als sie selbst.
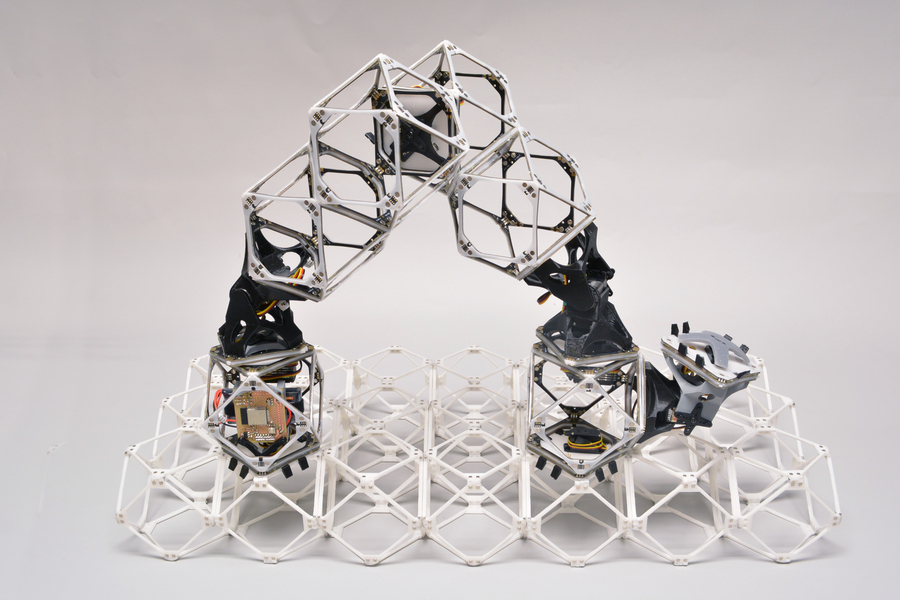
Diese zwei Roboter können bei Bedarf weitere Roboter bauen, um effizienter zu arbeiten.
Foto: MIT
Industrieroboter sind schon seit vielen Jahren eine Selbstverständlichkeit, aber ihre Einsatzmöglichkeiten sind begrenzt. Sie führen in der Regel klare Tätigkeiten innerhalb eines festgelegten Radius aus. Roboter, die wie ein Schwarm zusammenarbeiten und dabei individuell unterschiedliche Aufgaben erfüllen, waren in dieser Form bisher nicht denkbar. Wissenschaftlerinnen und Wissenschaftler vom Massachusetts Institute for Technology (MIT) ist in dieser Hinsicht jetzt ein Durchbruch gelungen. Nach jahrelanger Forschungsarbeit haben sie ein autonomes Robotersystem vorgestellt. Nach Angaben der Beteiligten sollen die Roboter sogar dafür geeignet sein, große Objekte zu bauen. Selbst Gebäude oder Fahrzeuge wären denkbar.
Initiative für vereinfachte Roboterprogrammierung
Roboter bauen große Objekte aus unzähligen identischen Teilchen
Die Grundlage des Robotersystems ist die Erkenntnis, dass nahezu alle Objekte aus winzigen, identischen Teilen zusammengebaut werden können. Das gilt sogar für verformbare Flugzeugflügel oder einen Rennwagen, der voll funktionstüchtig ist. Die Montage kann dann von Robotern ausgeführt werden, und nicht nur das: Sowohl die Komponenten des geplanten Objekts als auch die Montage-Roboter können alle aus denselben Untereinheiten bestehen. In der Studie haben sich die Roboter zudem unabhängig voneinander in großer Zahl bewegt. So konnten sie selbst größere Montage-Aufträge in kurzer Zeit erledigen.
Zugegeben, ein paar Jahre wird es wohl noch dauern, bis das Roboter-Montagesystem einsatztauglich ist, aber Neil Gershenfeld, Direktor des Centers for Bits and Atoms (CBA) am MIT, schätzt die aktuellen Ergebnisse aber als einen sehr wichtigen Schritt auf diesem Weg ein. Unter anderem habe das Team geklärt, zu welchem Zeitpunkt in einer Bauabfolge mehr Roboter benötigt werden, wie groß diese sein müssen und wie es möglich sein kann Roboter unterschiedlicher Größe in Schwärmen zu organisieren, ohne dass es zu Unfällen kommt.
Wie Roboter die Arbeitswelt verändern
Roboter bestehen aus Teilchen, die Daten übertragen können
Die Grundlage ist in der Branche bereits aus früheren MIT-Experimenten bekannt: Die größeren Strukturen bestehen aus einer Reihe winziger identischer Untereinheiten, den sogenannten Voxeln (dem volumetrischen Äquivalent eines 2D-Pixels). Doch während es sich bei den bisherigen Voxeln um rein mechanische Strukturelemente handelte, hat das Team nun komplexe Voxel entwickelt, die sowohl Energie als auch Daten von einer Einheit zur nächsten übertragen können. Dies könnte den Bau von Strukturen ermöglichen, die nicht nur Lasten tragen, sondern auch Arbeiten ausführen können, wie das Heben, Bewegen und Manipulieren von Materialien.
Wer sich die Roboter anschaut, erkennt, dass sie selbst aus einer Voxel-Kette bestehen. Diese können ein anderes Voxel mit Hilfe von Befestigungspunkten an einem Ende ergreifen und sich dann wie ein Wurm an die gewünschte Position bewegen, wo das Voxel an der wachsenden Struktur befestigt und dort losgelassen werden kann – so funktioniert das Bauen.
Roboter bauen Roboter – für mehr Effizienz
Ein wesentlicher Unterschied zu bisherigen Experimenten besteht darin, dass die Roboter bei Bedarf als Zwischenschritt größere Roboter bauen können. Denn das MIT arbeitet zwar schon länger an Roboter, die größere Strukturen erschaffen können, aber ab einem gewissen Umfang wurde ihre Arbeit ineffizient, weil sie für weitere Bauteile zu große Wege zurücklegen mussten. Für die neuen Roboter wäre dann der Punkt gekommen, eine größere Version ihrer selbst zu erschaffen. Die Wissenschaftlerinnen und Wissenschaftler haben entsprechende Algorithmen programmiert, die solche Entscheidungen ermöglichen.
Auch die Planung können die Forschenden komplett der Software überlassen. „Wenn man zum Beispiel einen Kegel oder eine Halbkugel bauen will, muss man sich zunächst verschiedene Fragen stellen“, sagt Amira Abdel-Rahman aus dem MIT-Team. „Wie beginnt man mit der Bahnplanung, und wie teilt man diese Form in verschiedene Bereiche auf, die von verschiedenen Robotern bearbeitet werden können?“ Die neu entwickelte Software soll genau das ermöglichen. Die Forschenden geben eine Form ein, und die Software errechnet, wo der erste Block und jeder weitere platziert werden sollte, und zwar auf der Grundlage der zu überwindenden Entfernungen.
„Es gibt Tausende von Veröffentlichungen über die Routenplanung von Robotern“, sagt Gershenfeld. „Aber der Schritt danach, dass der Roboter die Entscheidung treffen muss, einen anderen Roboter oder eine andere Art von Roboter zu bauen – das ist neu. Dafür gibt es wirklich kein Vorbild.“ Das Forschungsteam befasst sich jetzt mit den Details, etwa der Kraft der Roboter-Gelenke.


Mehr Innovationen im Bereich der Robotik:
Ein Beitrag von:














