Eine Person steuert mehr als 100 autonome Roboter
Ein Forschungsteam der Oregon State University hat gezeigt, zu was für einer großen Leistung Menschen fähig sind – eine Person kann über 100 autonome Drohnen oder Bodenroboter kontrollieren. Das wirft einen neuen Blick auf den Einsatz von Schwärmen, die beispielsweise zur Brandbekämpfung eingesetzt werden.
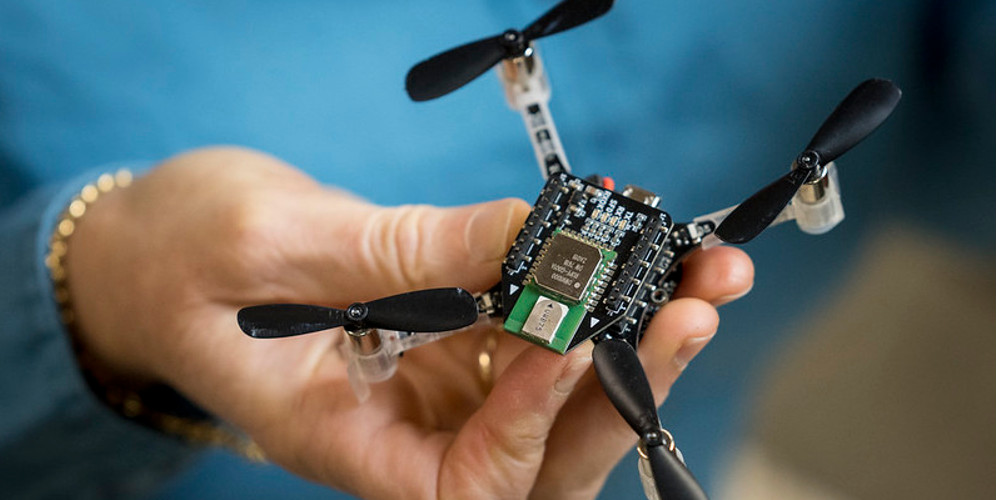
Autonom agierende Roboter lassen sich besser steuern, als bislang gedacht.
Foto: Karl Maasdam
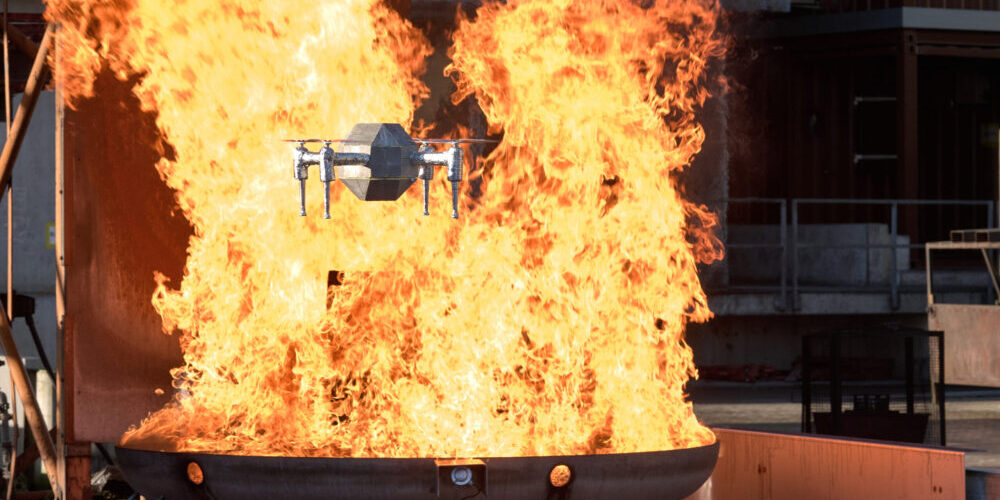
Es gibt viele Bereiche, in denen es sinnvoll sein könnte, autonome Roboter einzusetzen, etwa Drohnen-Schwärme, die Katastrophenhilfe in städtischen Gebieten leisten oder Fachkräfte bei der Brandbekämpfung unterstützen. Auch für die Paketauslieferung über den Luftweg sehen viele Experten und Expertinnen Drohnen langfristig als interessante Alternative an.
Auch wenn die Flugroboter autonom agieren und selbstständig ihr Ziel erreichen, ist es notwendig, sie zu kontrollieren. Dabei wäre es nicht effizient und auch nicht umsetzbar, jedem Fluggerät einen Drohnenpiloten zuzuweisen. Es stellt sich also die Frage, wie viele autonome Roboter ein Mensch unter realen Bedingungen überwachen kann. Wissenschaftler und Wissenschaftlerinnen der Oregon State University (OSU) haben genau das untersucht.
Entwicklung einer speziellen Systeminfrastruktur
Vier Jahre lang arbeiteten sie an dem Projekt und setzten dafür Schwärme von bis zu 250 autonomen Fahrzeugen ein – Multirotordrohnen und Bodenrover. Die Geräte waren in der Lage, Informationen in städtischen Regionen zu sammeln, wo die satellitengestützte Kommunikation durch Beton-Gebäude beeinträchtigt wird. Sie liefern auf diese Weise Informationen fürs Militär. Dementsprechend wurde die Forschung bezuschusst vom Defense Advanced Research Project Agency, auch Offensive Swarm-Enabled Tactics (OFFSET) genannt.
Bevor die Forschenden auf dem Übungsgelände loslegen konnten, mussten sie jedoch zunächst eine geeignete Systeminfrastruktur entwickelten und die Arbeit anderer Teams integrierten, die sich mit Schwarmtaktik, Schwarmautonomie, Mensch-Schwarm-Teams, physischen Experimenten und virtuellen Umgebungen befassten.


„Wir haben nicht nur die benötigten Systeme und die Software entwickelt, sondern auch eine Benutzeroberfläche für den Schwarmführer, damit ein einzelner Mensch diese Boden- und Luftsysteme einsetzen kann“, sagt Julie A. Adams vom OSU College of Engineering.
Benutzeroberfläche zur Steuerung der Drohnen und Bodenroboter
In Zusammenarbeit mit dem Unternehmen Smart Information Flow Technologies hat das Forschungsteam eine Virtual-Reality-Schnittstelle namens I3 entwickelt, die es dem Kommandanten ermöglicht, den Schwarm über Anweisungen auf hoher Ebene zu steuern. Adams erklärt, was genau damit gemeint ist: „Die Kommandanten haben nicht jedes einzelne Fahrzeug physisch gesteuert. Denn wenn man so viele Fahrzeuge einsetzt, kann ein einzelner Mensch das nicht leisten. Die Idee ist, dass der Schwarmkommandant eine Aufgabe auswählt und kleinere Anpassungen vornehmen kann.“
Praxistest mit autonomen Robotern
Dieses Prinzip hat ihr Team in der Praxis ausprobiert. Die Tests fanden in verschiedenen Ausbildungseinrichtungen des Verteidigungsministeriums statt. Bei jeder mehrtägigen Feldübung wurde die Zahl der autonomen Fahrzeuge erhöht, und alle zehn Minuten gaben die Schwarmführer Auskunft darüber, wie groß ihre Arbeitsbelastung war und wie gestresst oder erschöpft sie sich fühlten.
Bei der abschließenden Feldübung mit mehr als 100 Fahrzeugen wurde die Arbeitsbelastung der Kommandanten auch durch physiologische Sensoren ermittelt, die Informationen in einen speziellen Algorithmus einspeisten. Er analysierte aus diesen Informationen die Gesamtarbeitsbelastung.
Ergebnis: vertretbare Arbeitsbelastung
„Die geschätzte Arbeitsbelastung der Schwarmkommandanten überschritt zwar häufig die Überlastungsschwelle, aber immer nur für wenige Minuten, und der Kommandant war in der Lage, die Missionen erfolgreich abzuschließen, oft unter schwierigen Temperatur- und Windbedingungen“, sagt Adams. Für sie ist damit belegt, dass die Steuerung dieser Zahl von Drohnen oder autonomen Bodenrobotern für einen Schwarmführer gut zu bewältigen ist.
Das OSU College of Engineering ist bekannt für seine Arbeit in den Bereichen künstliche Intelligenz (KI), Robotik, fortschrittliche Fertigung, sauberes Wasser und Energie, Materialwissenschaften, Computertechnik, widerstandsfähige Infrastruktur und gesundheitsbezogene Technik. Die aktuellen Ergebnisse der Forschungsgruppe wurden in der Fachzeitschrift Field Robotics veröffentlicht.
Ein Beitrag von:










