Innovative Lösung: So lernen Roboter schwimmen
Forschenden des MIT ist es gelungen, einen schwimmenden Roboter aus wenigen Teilen und in kurzer Zeit herzustellen. Die Lösung: ein modulares System, das zusätzlich skalierbar ist. Somit sollen die neuen Roboter künftig auch in verschiedenen Größen produziert werden können.
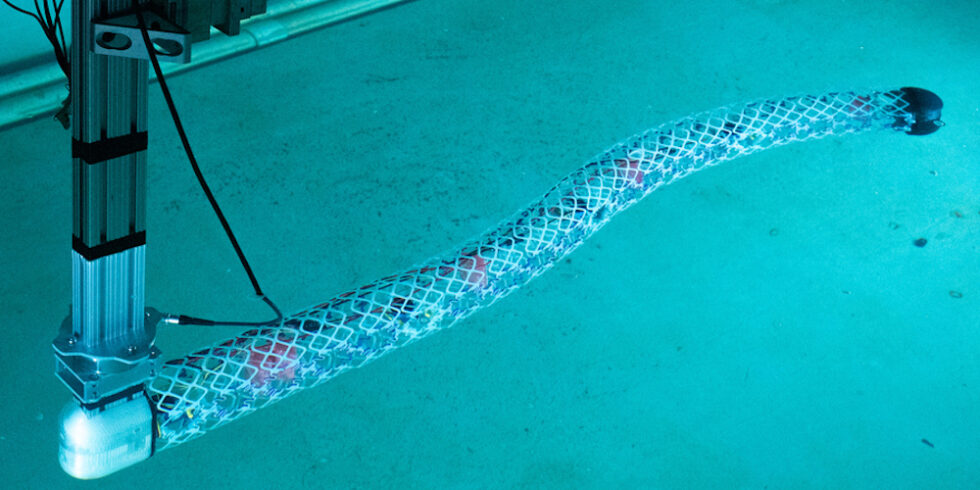
Ein modulares System macht es möglich: Die Unterwasserroboter des MIT-Forschungsteams sind verformbar und aus einfachen Komponenten erstellt.
Foto: MIT-Forschungsgruppe
Unterwasserroboter sind für zahlreiche Anwendungsgebiete geeignet: zum Beispiel in der Meeresforschung, aber auch für Rennyachten. Das gilt besonders für die Art von Roboter, die Forschende am Massachusetts Institute of Technology (MIT) jüngst entwickelt haben. Sie sind eine Konstruktion aus glattem Profil und einer dynamischen Form, die sich ändern kann. Damit sind sie Fischen relativ ähnlich und schieben sich dementsprechend effizienter durch das Wasser als starre Rümpfe.
Diese Roboter bauen bald gemeinsam große Gebäude
Die grundsätzliche Idee für einen solchen Unterwasserroboter ist nicht neu. Das Forschungsteam des MIT nutzte als Basis „RoboTuna“, einen Roboter, der aus 3.000 verschiedenen Teilen besteht und der vom Entwurf bis zur Fertigstellung zwei Jahre benötigte. Die Forschenden wollten mit ihrem neuen Ansatz aber eine andere Richtung verfolgen: Es sollten einfache Komponenten eingesetzt werden, die sich schnell und kostengünstig herstellen lassen sowie skalierbar sind. Denn ein solch modulares System könnte dann aktuelle Systeme erweitern und vergrößern.
Hohle Strukturen machen schwimmende Roboter flexibel und leicht
Damit diese innovative Idee Realität wird, haben die Forschenden gitterartige Teile, sogenannte Voxel, entwickelt. Sie zeichnen sich durch eine geringe Dichte und hohe Steifheit aus. Vor allem die geringe Dichte sei entscheidend, um ausreichend Spielraum bei der Skalierbarkeit zu erreichen. Gelungen ist ihnen das, indem sie die Kunststoffteile mit hohlen Strukturen mit schmalen Streben konstruierten. Die Formen sind dabei kastenartig gewählt und immer in einer Richtung tragend. Hinzu kommt: Die Teile sind trotzdem auch weich. Das sei durch eine ungewöhnliche Kombination gelungen, indem man steife und flexible Komponenten in unterschiedlichen Proportionen miteinander mische.
Grundsätzlich gibt es in der Robotik zwei Wege: Ein Teil der Forschung beschäftigt sich mit weicher und ein anderer Teil mit harter Robotik. Unter weichen Robotern versteht man flexible Maschinen, häufig aus Kunststoff und Silikon hergestellt. Dagegen sind harte Roboter meist solche, die man aus industriellen Anwendungen kennt, die zum Beispiel aus Metall gefertigt sind und selbst schwere Gegenstände bewegen können. Die Forschungsgruppe des MIT betrachtet ihren neuen Forschungsansatz als eine Art dritten Weg, der die besten Elemente aus beiden Richtungen miteinander verbindet. Wenn der neu entwickelte Roboter in Kombination mit einem Antrieb zum Einsatz kommt, biete er einen weiteren entscheidenden Vorteil: „Die glatte Flexibilität der Körperoberfläche ermöglicht es uns, eine Strömungskontrolle zu implementieren, die den Luftwiderstand verringern und die Antriebseffizienz verbessern kann, was zu einer erheblichen Kraftstoffeinsparung führt“, sagt Michael Triantafyllou, Professor für Ozeanwissenschaften und -technik und Teil des RoboTuna-Teams.
Schwimmender Roboter ähnelt einer Schlange
Der neu entwickelte Unterwasserroboter ähnelt optisch einer Schlange. Denn die Voxel sind in einer langen Reihe aneinandergereiht. Insgesamt besteht der Körper aus vier Segmenten, die jeweils fünf Voxel beinhalten. In der Mitte befindet sich ein Aktuator. Dieser kann die Struktur zusammenziehen und biegen. Die 20 Komponenten werden zusätzlich mit einer rippenartigen Stützstruktur und einer enganliegenden wasserdichten Neoprenhaut überzogen.
Die ersten Tests absolvierte der Roboter in einem Schlepptank des MIT. Die Ergebnisse waren vielversprechend: Der Roboter erzeugte einen ausreichenden Vorwärtsschub, um sich durch wellenförmige Bewegungen vorwärtszubewegen. Während der RoboTuna aus rund 3.000 verschiedenen Teilen besteht, kommen die Forschenden bei der neuen Entwicklung mit etwa 60 aus. Und auch zeitlich haben sie eine deutliche Verbesserung erzielt. Statt zwei Jahren Entwicklungs- und Bauzeit reichen nun zwei Tage.
Schwimmender Roboter: MIT-Forschende entwickeln zweite Form
Die Forschenden wollten neben der schlangenähnlichen Form noch eine weitere testen. Deshalb bauten sie eine flügelähnliche Form. Die Anordnung besteht aus denselben Voxel, allerdings kann der Roboter seine Profilform ändern und damit das Verhältnis von Auftrieb zu Luftwiderstand und andere Eigenschaften des Flügels steuern. Im Gegensatz zu der schlangenartigen Form haben die Forschenden bei der Flügelform eine Reihe schuppenartiger Kacheln überlappend konstruiert. Sie drücken aufeinander und werden so zu einer wasserdichten Abdichtung.
Diese bleibe sogar bestehen, wenn der Flügel seine Krümmung verändere. Eine solche Form könne zum Beispiel als Zusatz in einem Schiffsrumpfprofil zum Einsatz kommen. Denn mit diesem Roboter ließe sich die Bildung von Wirbeln reduzieren, die Widerstände verursachen. Das verbessere die Effizienz eines Schiffes und senke zusätzlich klimaschädliche Emissionen.
Mehr zum Thema Roboter:
Ein Beitrag von:










