Vierbeiniger Roboter rennt über schwieriges Gelände
Roboter für Rettungseinsätze rücken in greifbare Nähe. Denn amerikanische Forschende bringen ihnen das Laufen bei. Inzwischen schaffen sie es, über unwegsames Gelände zu laufen und dabei auch noch Hindernissen auszuweichen. Als Nächstes sollen sie das Springen lernen.
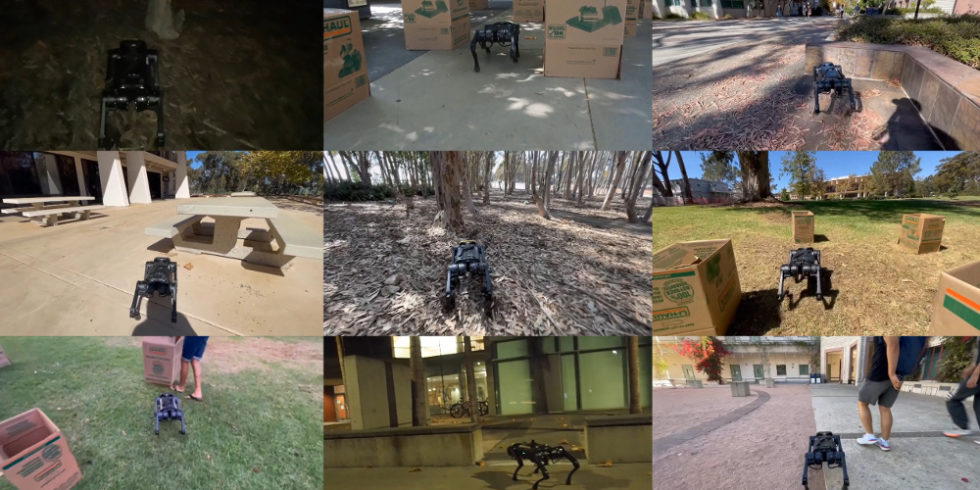
In dieser Collage sind verschiedene Szenarien zu sehen, in denen sich der Roboter bereits bewährt hat.
Foto: University of California San Diego
Wenn es für den Menschen gefährlich wird, könnten Roboter die Lösung sein. Das gilt für viele Situationen, etwa für Rettungseinsätze in Risikogebieten. Dafür müssen die elektronischen Helfer aber eine Menge können, beispielsweise über komplexen Untergrund laufen, Hindernissen ausweichen oder sie sogar beiseite räumen. Das heißt, all die Fähigkeiten, die sie unter perfekten Laborbedingungen bereits beherrschen, nützen ihnen in solchen Momenten wenig. Wissenschaftlerinnen und Wissenschaftler der University of California San Diego arbeiten an einer Lösung, und die ersten Praxistests sind vielversprechend.
Roboter rennt, sieht und spürt den Boden unter seinen Füßen
Wer dem vierbeinigen Roboter zusieht, dürfte überrascht sein: Er rennt los, und das über sandige Oberflächen, Kies, Gras und holprige Erdhügel, die mit Ästen und Laub bedeckt sind. Es wäre nicht überraschend, wenn er auf einem Erdhügel ins Stolpern käme, an einem Strauch hängen bliebe oder auf lockeren Steinen den Halt verlöre. Doch das tut er nicht. Auch in einem Büroraum kommt er gut klar. Der Untergrund ist dort zwar glatt, aber er muss Kisten, Stühlen und umhergehenden Menschen ausweichen.
Roboter-Installationen in China auf Rekordhöhe
Wie ist das gelungen? Die Wissenschaftlerinnen und Wissenschaftler haben für die Datengrundlage, die ihr Roboter braucht, zwei verschiedene Prinzipien vereint: Auf der einen Seite steht das Sehen, also die optische Erfassung von Informationen. Auf der anderen Seite haben sie dem Roboter das Prinzip der Propriozeption beigebracht. Bei Menschen ist damit die Fähigkeit gemeint, jederzeit die Lage des eigenen Körpers im Raum erfassen zu können. Den Roboter haben die Forschenden dafür mit Bewegungssensoren ausgestattet. Er kann auch seine Richtung und Geschwindigkeit bestimmen. Ein zusätzlicher Tastsinn soll gewährleisten, dass er quasi den Boden unter den Füßen spürt.
Neue Algorithmen werten die Daten für den Roboter aus
Die Expertinnen und Experten haben dem Roboter die unterschiedlichen Fähigkeiten nacheinander antrainiert. „In dem einen Fall ist es so, als würde man einem blinden Roboter beibringen zu gehen, indem er einfach den Boden berührt und fühlt. Im anderen Fall plant der Roboter seine Beinbewegungen allein auf der Grundlage seines Sehvermögens. Er lernt nicht zwei Dinge gleichzeitig“, sagt Xiaolong Wang, Professor für Elektro- und Computertechnik an der UC San Diego Jacobs School of Engineering.
Das Ganze funktioniert natürlich nur dank einer ausgeklügelten künstlichen Intelligenz (KI), die alle Informationen auswertet und daraus die richtigen Schlüsse zieht. Das System, das Wang und sein Team entwickelt haben, verwendet einen speziellen Satz von Algorithmen, um Daten aus Echtzeitbildern, die von einer Tiefenkamera am Kopf des Roboters aufgenommen wurden, mit Daten von Sensoren an den Beinen des Roboters zu vereinen. Das war komplizierter, als es klingt. „Das Problem bestand darin, dass es im realen Betrieb manchmal eine leichte Verzögerung beim Empfang der Kamerabilder gibt“, erklärt Wang. Die unterschiedlichen Daten trafen also zum Teil zeitversetzt ein.
Forschende wollen den Roboter bald springen lassen
Die Forschenden lösten dieses Problem, indem sie zahlreiche Varianten durchspielten, bei denen sie diese Diskrepanz simulierten. Dafür ordneten sie die Eingabesätze zufällig an. Dieses Prinzip, multimodale Verzögerungsrandomisierung genannt, setzten sie für das Training des Roboters ein. Jetzt kann er während der Navigation schnell Entscheidungen treffen und Veränderungen in seiner Umgebung regelrecht vorausahnen. In abwechslungsreichem Gelände ist das ein entscheidender Faktor.
Die Wissenschaftlerinnen und Wissenschaftler sind auf diese Weise einen großen Schritt vorangekommen, aber das reicht ihnen noch nicht. „Unsere nächsten Ziele sind, einen Roboter in die Lage zu versetzen, Treppen hinauf und hinunterzugehen, auf Steinen zu laufen, die Richtung zu wechseln und über Hindernisse zu springen“, sagt Wang. Es scheint nur noch eine Frage der Zeit zu sein, bis es vierbeinige Roboter im realen Außeneinsatz in Krisengebieten gibt.
Mehr Beiträge über Robotik:
Ein Beitrag von:














