Wie LEGO: Roboter-Bausatz für den Bau einer Mondbasis
Bei Flügen zum Mond werden Roboter für ganz unterschiedliche Funktionen benötigt. Forschende vom MIT haben daher einen innovativen Ansatz vorgestellt: ein Bausatz, der sich so kombinieren lässt, dass verschiedene Roboter-Type dabei entstehen. Astronauten und Astronautinnen könnten die Roboter selbst zusammensetzen.
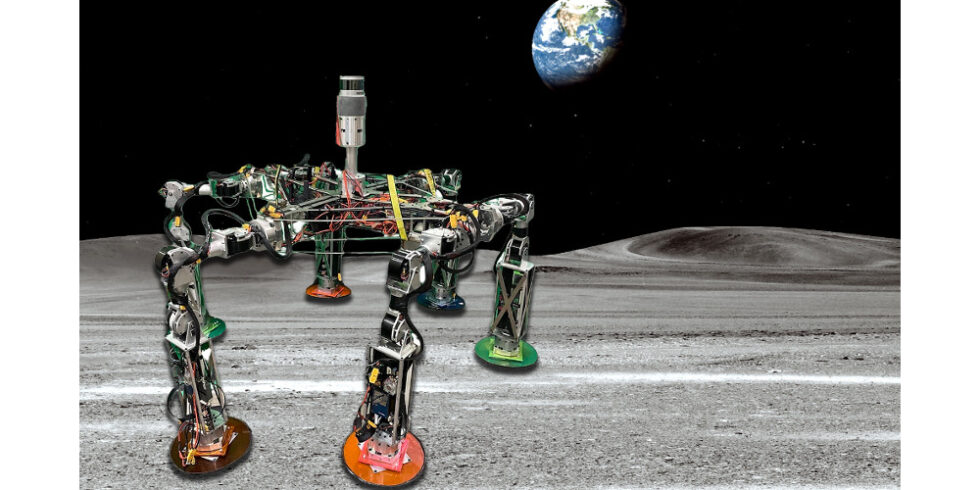
An den Basiskörper werden Glieder angehängt. Das ist das Prinzip.
Foto: MIT
Ein flinker Spinnenroboter erkundet eine Lavaröhre nach gefrorenem Wasser, während ein robuster Elefantenroboter Solarzellen durch die unwirkliche Mondlandschaft schleppt – so könnte es aussehen, wenn die NASA damit beginnt, eine permanente Basis auf dem Mond zu bauen. Sie wird dabei viele technische Helfer brauchen. Allerdings wird es kaum möglich sein – wie es sonst üblich ist – Roboter zu produzieren, die auf spezielle Aufgaben ausgerichtet sind. Dafür dürfte die Zahl der benötigten Funktionen schlicht zu hoch sein. Aber Ingenieure und Ingenieurinnen vom Massachusetts Institute for Technology (MIT) haben dafür eine Lösung gefunden: einen Roboter-Bausatz.
Der MIT-Roboter funktioniert wie ein LEGO-Bausatz
Soll der neue Roboter Kabel verlegen oder einen Kommunikationsturm errichten? Es spielt keine Rolle, denn er wird einfach so zusammengesetzt, dass er seine Aufgabe erfüllen kann. Das ist der Ansatz der MIT-Forschenden. Sie haben einen Bausatz entworfen, der nach Ende der Mission wieder auseinandergenommen und zu einem anderen Roboter zusammengefügt werden kann. Im Prinzip ähnelt das Konzept also einem LEGO-Baukasten.
Autonome Roboter erkunden Lavahöhlen für künftige Basislager auf dem Mond
Das Team nennt das System Walking Oligomeric Robotic Mobility System, was zu der eingängigen Abkürzung WORMS führt. Das ist kein Zufall, denn einige Bauteile sind Roboterglieder, die von Würmern inspiriert wurden. Sie werden auf eine Basis aufgesteckt, wenn ein Laufroboter benötigt wird. Sie können aber auch zu einem Packroboter zusammengesteckt werden oder zu einem sechsbeinigen Spinnenroboter. Das Entscheidende bei diesem System ist seine Einfachheit: Die Astronauten und Astronautinnen können die Roboter selbst konfigurieren. Spezielles Fachwissen brauchen sie nicht – wie bei Lego.
Nach dem Einsatz wird der MIT-Roboter einfach wieder zerlegt
„Man könnte sich einen Schuppen auf dem Mond mit Regalen voller WORMS vorstellen“, sagt der Leiter des Teams George Lordos, Dozent am MIT Department of Aeronautics and Astronautics (AeroAstro). „Astronauten könnten in den Schuppen gehen, die benötigten Würmer zusammen mit den richtigen Schuhen, dem Körper, den Sensoren und Werkzeugen auswählen und alles zusammenstecken, um es dann wieder zu zerlegen und ein neues Exemplar herzustellen. Das Design ist flexibel, nachhaltig und kosteneffektiv.“
Sein Team hat bereits gezeigt, dass dieser Ansatz funktioniert und einen sechsbeinigen WORMS-Roboter gebaut und der Öffentlichkeit vorgestellt.
Verschiedene Tiere waren die Inspiration für den Baukasten
WORMS wurde 2022 als Antwort auf die „Breakthrough, Innovative and Game-changing (BIG) Idea Challenge“ der NASA konzipiert. Dabei handelt es sich um einen jährlichen Wettbewerb für Universitätsstudenten. 2022 forderte die NASA sie dazu auf, Robotersysteme zu entwerfen, die sich in extremem Gelände ohne Räder bewegen können. Ein Team des Space Resources Workshop des MIT nahm als Ausgangspunkt die Mondlandschaft, die geprägt ist von dicken Staubschichten, steilen Felshängen und tiefen Lavaröhren.
Im Brainstorming stellte das Team sich für die verschiedenen Aufgaben Tiere vor: etwa wendige Spinnen mit langen Beinen und starke, robuste Elefanten. „Als wir über diese tierischen Inspirationen nachdachten, stellten wir fest, dass eines der einfachsten Tiere, der Wurm, ähnliche Bewegungen wie ein Arm oder ein Bein oder ein Rückgrat oder ein Schwanz macht“, erzählt der AeroAstro-Absolvent Michael Brown. Da kam den Forschenden die entscheidende Idee: wurmartige Anhängsel zu verwenden, um daraus die verschiedenen Roboter zu bauen, die Tieren ähneln.
MIT-Roboter ist mit einfachem Verschluss-System ausgestattet
Die einzelnen Gliedmaßen (Würmer) werden durch einen einfachen Verschluss an einem Basis-Körper befestigt. Später können die Teile mit einem kleinen Werkzeug, das die federbelasteten Stifte des Blocks löst, wieder voneinander getrennt werden.
Gliedmaßen und Körper können auch in Zubehörteile einrasten, etwa in ein LiDAR-System, das die Umgebung kartieren kann, um dem Roboter bei der Navigation zu helfen. Das Team hat geplant, weitere Sensoren und Werkzeuge zu entwickeln, die ebenso einrasten können, zum Beispiel Gleichgewichtssensoren oder ein Bohrer.


Der Roboter ist zudem ausgestattet mit einer speziell entwickelten Software, die auf die Koordinierung mehrerer Anhängsel zugeschnitten werden kann. Einen ersten Praxistest hat das System bereits erfolgreich bestanden.
Mehr lesen über moderne Roboter-Technologie:
Ein Beitrag von:











