Roboter Rovina aus Bonn erkundet antike Katakomben in Rom
Forscher der Uni Bonn haben einen fahrenden Roboter mitentwickelt, der den Spuren der frühen Christen in Rom auf der Spur ist. Das mit Hightech vollgestopfte Gefährt ist derzeit in den engen Priscilla-Katakomben in Rom unterwegs und erstellt sogar eine 3D-Karte – völlig selbstständig und nahezu in Echtzeit. Die Bilder, die Rovina aufnimmt, sind beeindruckend.

Der Bonner Roboter Rovina ist derzeit in den Priscilla-Katakomben des Vatikans in Rom unterwegs. Durch die hohen Radon-Belastungen können dort nur Roboter länger unterwegs sein.
Foto: Stachniss/Seiler/Algorithmica


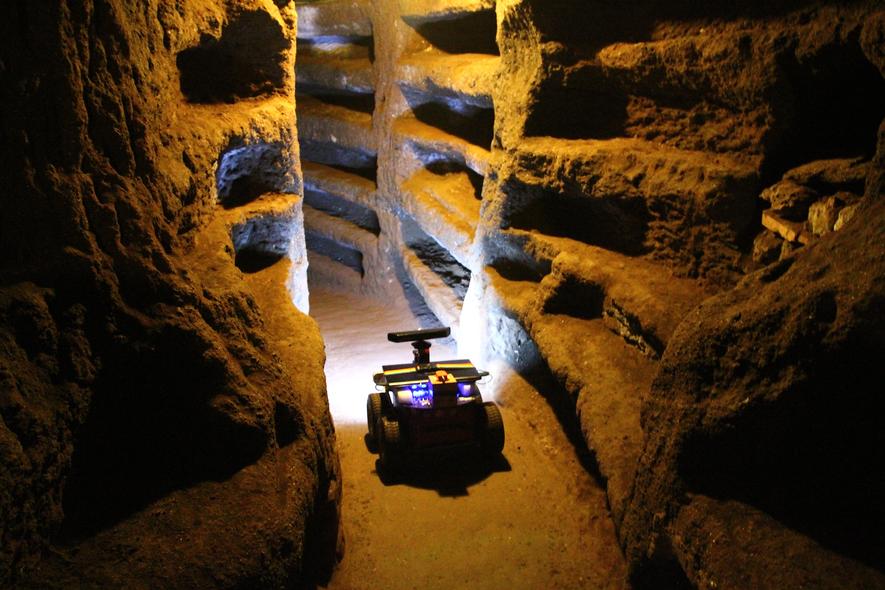








Die engen Gänge bereiten Rovina die wenigsten Probleme. Schließlich ist der Roboter recht schmal und kann mit seinem Gummmikettenantrieb auch Treppen hoch und runter fahren. Mehr als 5 km der Priscilla-Katakomben in Rom hat das Gefährt bereits erkundet und scannt dabei mit gleich mehreren Kameras das Umfeld ab – ganze 20 Mal pro Sekunde.
Mitverantwortlich für die Hightech-Konstruktion sind Forscher der Abteilung Photogrammetire an der Uni Bonn. Dass Rovina nun in die römische Unterwelt geschickt wurde, hat natürlich einen Grund. Vor allem die tieferen Etagen der Katakomben, in denen sich auch unzählige Grabkammern römischer Märtyrer befinden, sind stark mit radioaktivem Radon belastet und können von Menschen allenfalls kurz und nur in Schutzanzügen betreten werden. „Gefährlich wird das Gas, wenn es sich in der Lunge mit Feuchtigkeit verbindet“, erklärt Professor Cyrill Stachniss von der Uni Bonn gegenüber Ingenieur.de. Deshalb können sich Menschen nur in Schutzanzügen in den untersten Katakomben aufhalten.
Rovina erstellt eine Karte in Echtzeit
Die Besonderheit des Rovina-Roboters liegt nicht so sehr in seiner robotischen Konstruktion, denn die Bauteile stammen aus dem Standardbaukasten. Immerhin wurde der rollende Roboter, der mit seinen Gummiketten auch Hindernisse überklettern kann, speziell an die Bedürfnisse in den Katakomben angepasst.

In schmalen Gängen von 60 bis 70 cm findet sich der Roboter Rovina zurecht. Das Besondere des Roboters ist aber nicht die Hardware, sondern die Software. Mit ihrer Hilfe kann Rovina während der Fahrt seine Umgebung kartieren und sich selbstständig zurechtfinden. Mit 50-Watt-LED-Lampen leuchtet er die Katakomben aus, um die Umgebung für ein späteres 3D-Modell zu filmen.
Quelle: Stachniss/Seiler/Algorithmica
„Die Besonderheit ist die spezielle Software“, so Prof. Stachniss, der das Projekt noch an der Uni Freiburg begonnen hat und nach seinem Wechsel an die Universität Bonn im Rheinland fortsetzt. Nahezu in Echtzeit erfasst der Roboter mit Kameras seine Umgebung, speichert die visuellen Daten und konstruiert daraus eine 3D-Ansicht. Das heißt: Bereits während Rovina durch die Gänge fährt, erstellt die Software eine präzise Karte.
Verirren kann sich das Gefährt quasi gar nicht. Der Trick: Rovina fährt Schleifen und kehrt immer wieder zu Positionen zurück, an denen sie schon war. Ein Vorteil dieser Schleifentaktik: Mögliche Fehler beim Kartierungsprozess können in einem zweiten Anlauf erkannt und korrigiert werden.
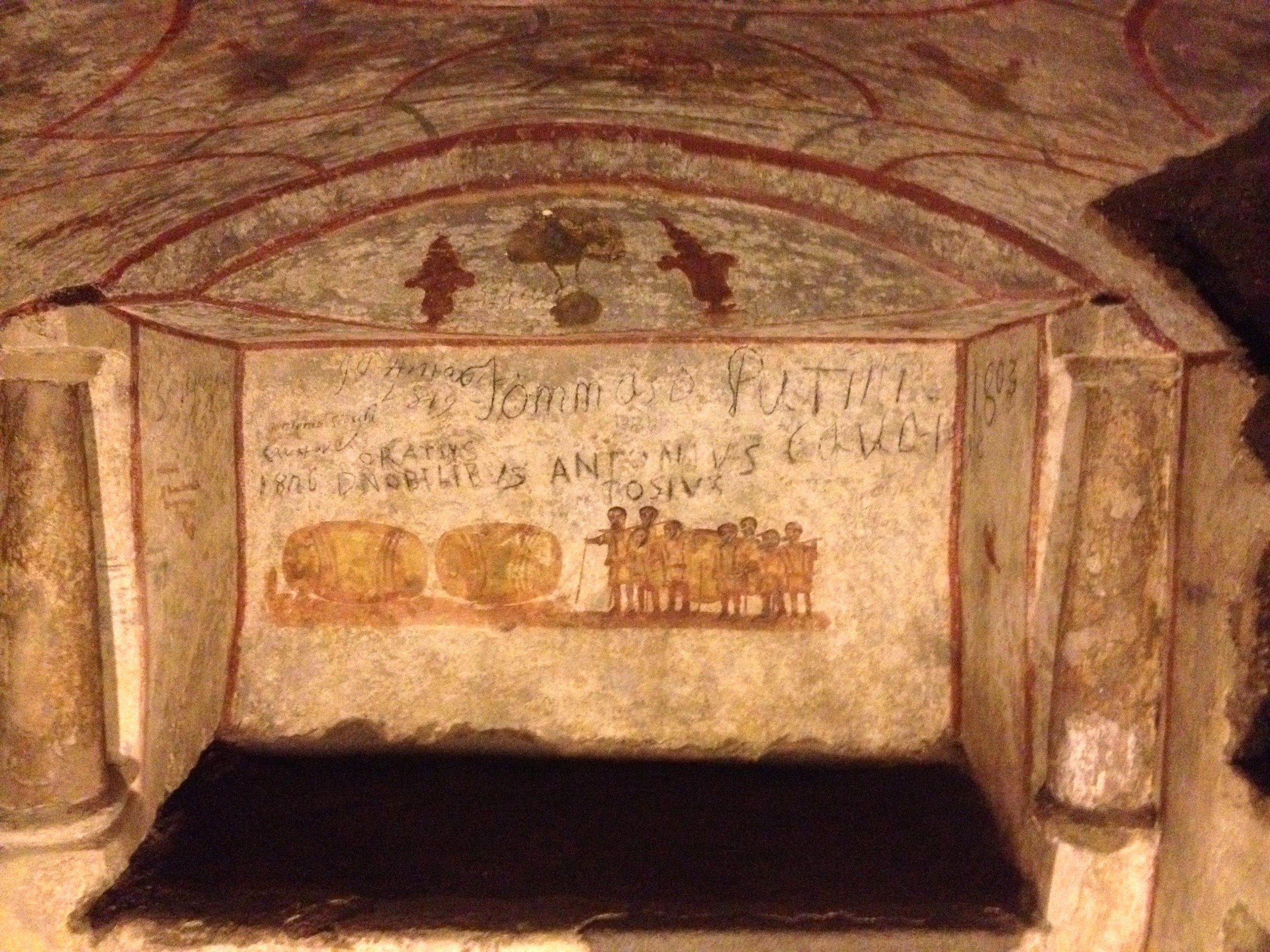
Herrliche Wandmalerien der frühen Christen dokumentiert der Bonner Roboter Rovina in den Katakomben von Rom.
Quelle: Stachniss/Seiler/Algorithmica
Dass ein Algorithmus ausgesprochen kompliziert ist, der es einem Roboter erlaubt, vollautomatisch unterwegs zu sein und dabei auch noch Karten erstellt, liegt auf der Hand.. Wie Stachniss erklärt, handelt es sich bei den derzeitigen Touren des Roboters in Rom um Testeinsätze, die dazu dienen, die komplexe Software an Bord weiter zu optimieren. Die komplette Erfassung der Katakomben soll im kommenden Frühjahr beginnen.
Geplant: 3D-Modell der Katakomben im Internet
Das von der EU mit rund 3,5 Millionen Euro geförderte Projekt könnte irgendwann für jedermann einen konkreten Nutzen bringen. Denn ähnlich wie bei Google Streetview könnten auch die Katakomben mit ihren Grabkammern vom heimischen Rechner aus erkundet werden – völlig ungefährlich und in 3D. Professor Stachniss und sein Institut haben bereits Anfragen von Forscherkollegen erhalten, ob Rovina nicht auch einmal durch die Maya-Tempel in Mittelamerika rollen könnte.
Die Bonner Universität arbeitet bei diesem Projekt eng mit Forscherkollegen anderer Universitäten zusammen. Zur Forschungsgruppe zählen die RWTH Aachen, die belgische Universität Leuven, die Universität Rom sowie Forscher anderer Einrichtungen in Italien und des Unternehmens Algorithmica.
Ein Beitrag von:















