Caltechs Roboter trotzt Schäden: KI inspiriert von verletzten Fischen
Fische können sich selbst mit beschädigter Flosse noch fortbewegen. Forschende am Caltech haben diese Fähigkeit auf Roboter übertragen.

Lernen von der Natur: Forschende am Caltech haben sich angeschaut, wie sich Fische mit verletzter Flosse fortbewegen und das auf Roboter übertragen.
Foto: PantherMedia / Martin Hablützel
Roboter und Tiere haben mehr gemeinsam, als man auf den ersten Blick vermuten würde. Besonders wenn es um Anpassung und Effizienz bei Bewegungen geht. Ein Forschungsteam am California Institute of Technology (Caltech) hat einen Roboter entwickelt, der selbst mit erheblichen Schäden weiterhin effizient schwimmt, ähnlich wie ein verletzter Fisch. Möglich wurde dies durch den Einsatz künstlicher Intelligenz (KI) und bioinspirierten Anpassungstechniken.
Bioinspirierte Anpassung: Ein Blick in die Natur
Die Natur hat viele Mechanismen entwickelt, um Schäden zu kompensieren. Fische und Insekten sind besonders bemerkenswert in ihrer Fähigkeit, auch mit beschädigten Flossen oder Flügeln effizient zu navigieren. Manche Fische können sogar mit bis zu 76 Prozent beschädigter Flossen weiter schwimmen. Diese beeindruckende Anpassungsfähigkeit diente als Inspiration für das Team am Caltech.
Unter der Leitung von Professor Mory Gharib, Ph.D., haben Meredith Hooper, Doktorandin der Luft- und Raumfahrttechnik, und Isabel Scherl, wissenschaftliche Mitarbeiterin, einen Roboter entwickelt, der durch Flügelschläge angetrieben wird. In einem speziellen Öltank, der präzisere Messungen als Wasser ermöglicht, testeten sie den Roboter. Nach der Amputation eines Teils seiner Flosse setzten sie maschinelles Lernen ein, um dem Roboter zu helfen, seine Bewegungen anzupassen und weiterhin effizient zu schwimmen.
„Der Roboter probiert zehn verschiedene Schwimmtechniken aus“
Ohne Anpassung wäre der Roboter nach der Beschädigung nicht mehr schwimmfähig gewesen. Dank der bioinspirierten Anpassungstechniken wurde er jedoch so programmiert, dass er verschiedene Schlagmechaniken ausprobierte. Mithilfe von Algorithmen des maschinellen Lernens analysierte der Roboter die Effizienz jeder Methode und optimierte seine Bewegungen. Dies ermöglichte ihm, selbst wenn 50 Prozent seiner „Flosse“ fehlen, weiterhin effektiv zu schwimmen.
„Der Roboter probiert zehn verschiedene Schwimmtechniken aus,“ erklärt Hooper. „Wir messen die erzeugten Kräfte im Öltank, vergleichen Kraftproduktion und Effizienz und der Algorithmus wählt die besten Techniken aus. Dieser Prozess wird wiederholt, bis die effizienteste Schwimmbewegung gefunden ist.“
Praktische Anwendungen für autonome Systeme
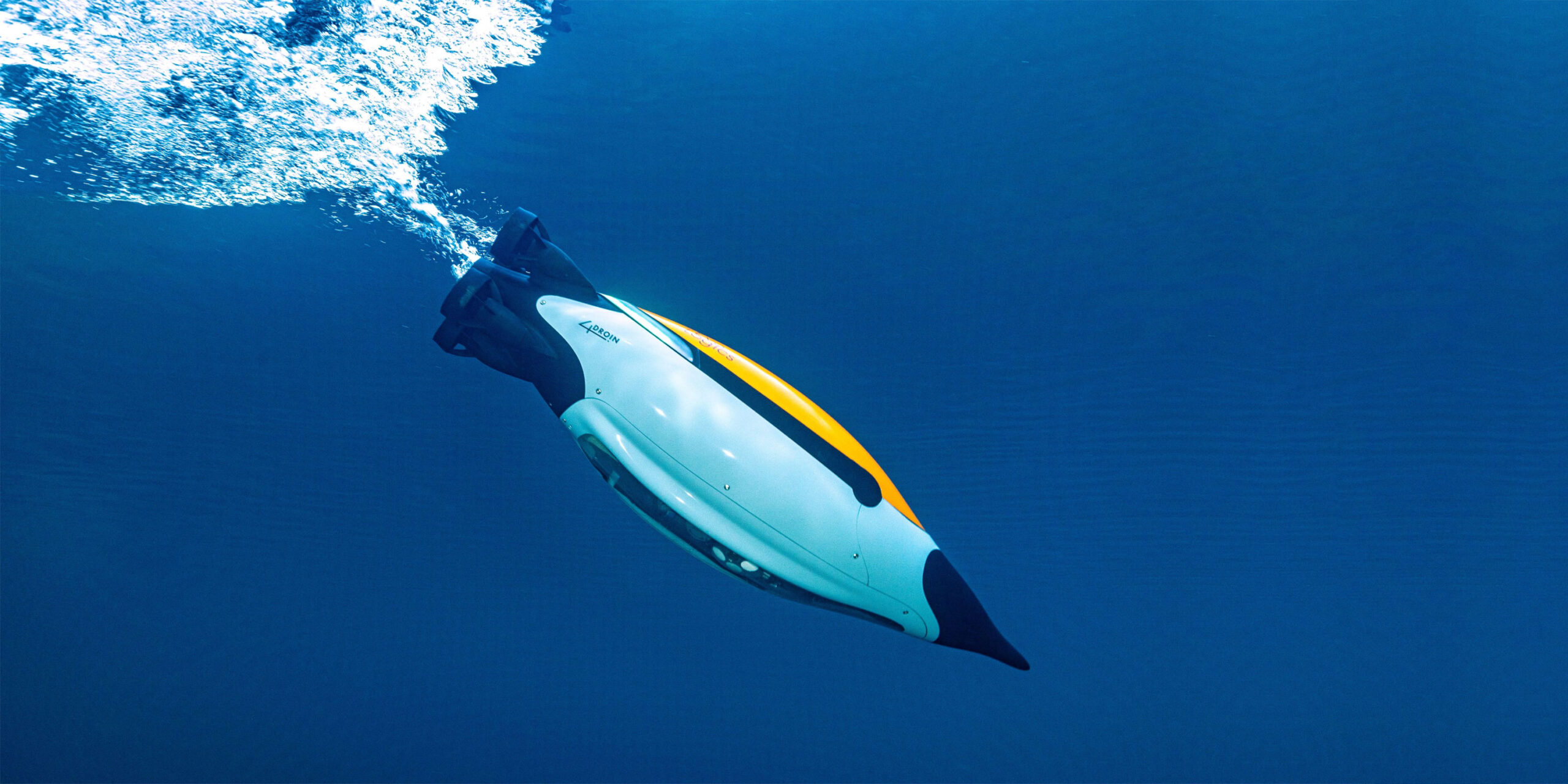
Die Forschungsergebnisse könnten erhebliche Auswirkungen auf die Praxis haben. Autonome Unterwasserfahrzeuge (AUVs) und Mikro-Luftfahrzeuge (MAVs) könnten stark von diesen Anpassungsfähigkeiten profitieren. Hooper betont, dass AUVs, die oft in unzugänglichen Gebieten eingesetzt werden, sehr teuer sind. Eine Beschädigung ohne Anpassungsmöglichkeit könnte sie nutzlos machen. Durch die Fähigkeit zur Anpassung könnte ihre Einsatzfähigkeit und Langlebigkeit deutlich erhöht werden.
Auch MAVs, die in Notfallszenarien wie Erdbeben eingesetzt werden, könnten robuster und effizienter werden. In schwierigen Umgebungen, wo Schäden wahrscheinlicher sind, könnte diese Technologie entscheidend sein.

Unterschiede zwischen Robotern und natürlichen Systemen
Obwohl sowohl der Roboter als auch natürliche Systeme ihre Bewegungsmechaniken anpassen können, unterscheiden sich die genauen Modifikationen. Während Fische meist die Amplitude ihrer Schläge erhöhen, können Roboter sowohl die Amplitude als auch die Frequenz ihrer Bewegungen anpassen.
„Dies ist höchstwahrscheinlich auf die Auswirkungen des evolutionären Drucks auf Fische und Insekten zurückzuführen, der für den Einsatz von Robotern nicht relevant ist“, erklärt Hooper. „Die Art und Weise, wie sich Klapproboter am besten an Schäden anpassen, entspricht nicht unbedingt der Natur“.
Die Studie „Bio-inspirierte kompensatorische Strategien für Schäden an schlagenden Roboterantrieben“ wurde in der Ausgabe vom 3. Juli des „Journal of the Royal Society Interface“ veröffentlicht.
Ein Beitrag von: