Dribbelnde Vierbeiner und sensible Hände
Zwei Forschungsteams des MIT haben im Bereich der Robotik neue Meilensteine erreicht: Einem vierbeinigen Roboter brachte das eine Team bei, einen Ball auf unterschiedlichem Terrain zu dribbeln. Das andere Team entwickelte eine Roboterhand mit vom Menschen inspirierten Fingern.

Forschende brachten einem vierbeinigen Roboter bei, einen Ball auf unterschiedlichem Terrain zu dribbeln.
Foto: Mike Grimmett/MIT CSAIL
Ein vierbeiniger Roboter, der es schafft, auf Kies, Schnee, Sand oder Schlamm einen Ball gekonnt zu dribbeln – klingt seltsam, soll aber in Zukunft sehr nützlich sein. Denn die Forschenden sehen die Einsatzmöglichkeiten solcher Roboter unter anderem in Katastrophengebieten. „Wir brauchen die Maschinen, um über Gelände zu gehen. Roboter auf Rädern sind bei Erdbeben oder Überschwemmungen nicht einsetzbar“, sagt Pulkit Agrawal, MIT-Professor und Direktor des Improbable AI Lab für Robotersysteme.
Arbeiten Roboter bald in der Backstube?
Auch wenn der Roboter sicherlich nicht das Geschick eines Weltfußballers hat, so sind die Bewegungen durchaus beeindruckend. Die Forschenden bedienen sich dem Ansatz des verstärkenden Lernens, um ihn zu trainieren. Das bedeutet: Der Roboter erhält eine Belohnung, wenn er es richtig macht und eine negative Verstärkung, wenn er es vermasselt. Auf diese Art und Weise lernt der Roboter die Bewegungsabläufe. Die Forschenden gingen sogar noch einen Schritt weiter: Dank eines sogenannten Recovery-Controllers kann der Roboter sich von Stürzen erholen, steht wieder auf und kehrt zum Dribbling zurück.
Dribbelnder Vierbeiner: neuronales Netz als Basis
Das Dribbeln verlangt dem Roboter deutlich mehr Leistung ab: Er muss seine Fortbewegung anpassen, den Ball im Blick haben, die Bewegungen und die Geschwindigkeit abschätzen, ihn richtig treffen und dann auch noch darauf reagieren, wie sich der Ball auf den unterschiedlichen Böden verhält. Während der Ball sich im Sand nur schwer fortbewegen lässt, rollt er auf Gras oder festem Boden sehr gut und auch nahezu von alleine.
Dank einiger Sensoren kann der Roboter seine Umgebung entsprechend wahrnehmen. Aktuatoren sorgen dafür, dass er ausreichend Kräfte aufbringt, um sich selbst und andere Objekte – wie den Fußball – zu bewegen. Das „Gehirn“ des Roboters ist ein Computer, der die Sensordaten in Aktionen umwandelt. Erst die Kameras am Kopf und Körper des Roboters sorgen für eine neue sensorische Modalität des Sehens, durch die das Dribbeln dann erst möglich wird. Die gesamte Hardware, das neuronale Netz, ist absichtlich sehr reduziert und leicht gewählt, damit der Roboter vielseitig einsetzbar ist.
Roboterhand mit durchgehenden Sensoren
Erstmals baute ein MIT-Team einen Roboterfinger, der aus einem starren Skelett besteht, das darüber hinaus von einer weichen Außenschicht umhüllt ist. In dieser Haut sind außerdem hochauflösende Sensoren integriert. So kann der Roboter über die gesamte Länge des Fingers das Objekt, das er greift, im Detail erfassen. Darüber hinaus machen die Sensoren es möglich, dass die Hand mit einer Genauigkeit von etwa 85% in der Lage ist, nach nur einem Griff das Objekt zu identifizieren. Der Roboter kann also einerseits schwere Gegenstände greifen und heben, aber auch empfindliche und biegsame, ohne diese zu zerquetschen.
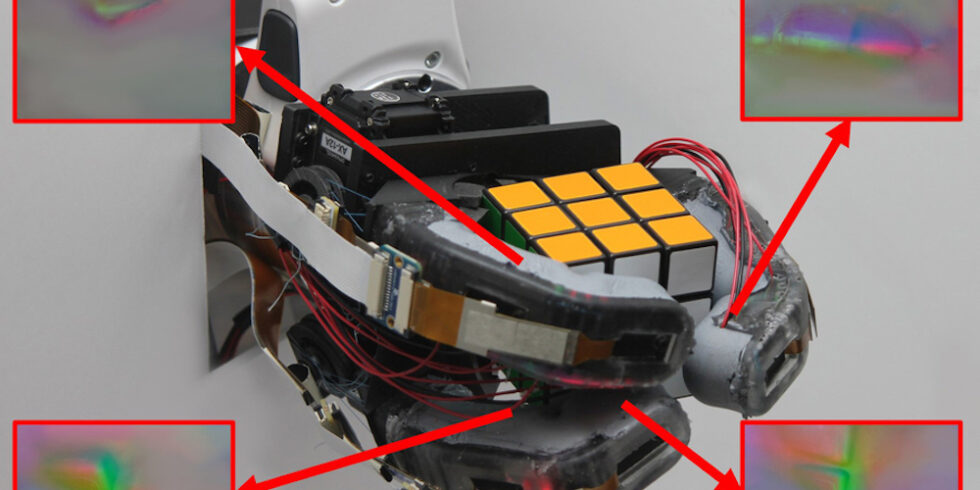
Das Forscherteam hat dafür einen Roboterfinger aus dem 3D-Drucker verwendet. Die transparente weiche Hülle besteht aus Silikon. Hinzu kommen sogenannte Berührungssensoren, die aus Kameras und farbigen LEDs bestehen. Sobald der Finger ein Objekt greift, nimmt die Kamera die Bilder auf. Die farbigen LEDs beleuchten die Hülle von innen. Ein Algorithmus berechnet dann die beleuchteten Konturen praktisch rückwärts, um dann die Konturen des Objekts abzubilden. Auch hier kam ein maschinelles Lernmodell zum Einsatz, damit der Roboter die Objekte richtig identifiziert.
Vom Menschen inspirierter Finger
Die Kombination aus starren und weichen Elementen ist elementar für eine Hand. Denn sie muss nicht nur schwere Gegenstände sicher greifen und heben können, sondern auch sensible Bereiche abtasten und sehr vorsichtig hantieren. Die Forschenden betrachten ihre sensible Roboterhand deshalb als gut geeignet für den Einsatz zum Beispiel in der häuslichen Pflege. Der Roboter könnte mit ein- und derselben Hand einer Person beim Baden helfen, auch einen schweren Gegenstand aus einem Regal heben. Im nächsten Schritt wollen die Forschenden ausprobieren, ob sich auch eine Handfläche hinzufügen lässt, da sie noch einmal andere Oberflächensensibilität aufweist und den Tastsinn der Finger ergänzt.
Mehr zum Thema Roboter:
Ein Beitrag von: