Roboter lernt chirurgische Eingriffe allein durchs Zuschauen
Die medizinische Robotik ist wieder einen Schritt weiter: Imitationslernen ermöglicht selbstständige und präzise chirurgische Eingriffe durch einen Roboter.
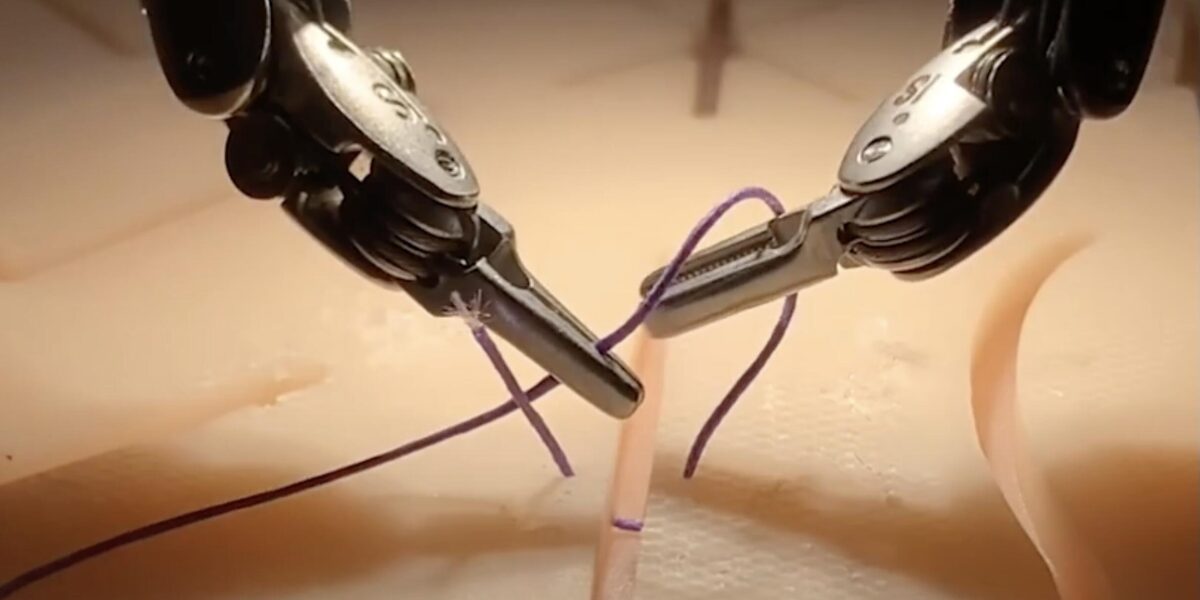
Alleine durch das Anschauen von Videos hat ein Roboter das nötige chirurgische Handwerk erlernt, um Operationen selbstständig durchzuführen.
Foto: Johns Hopkins University
Chirurgische Roboter sind ein etabliertes Werkzeug in der modernen Medizin. Bislang mussten Roboter jedoch für jeden Eingriff spezifisch programmiert werden, was die Technologie in ihrer Anwendung einschränkte. Forschende der Johns Hopkins University haben nun einen neuen Ansatz getestet, der dies grundlegend verändern könnte. Durch das sogenannte Imitationslernen konnten sie einem Roboter beibringen, chirurgische Eingriffe allein durch das Betrachten von Videos zu erlernen – und das mit einer bemerkenswerten Präzision.
Imitationslernen bedeutet vom Chirurg lernen
Das Team, unterstützt von der Stanford University, nutzte eine Methode, die aus der Robotik und dem maschinellen Lernen bekannt ist: das Imitationslernen. Statt den Roboter manuell für jeden Schritt einer Operation zu programmieren, wurde er trainiert, Bewegungsabläufe durch das Anschauen von Videosequenzen zu verstehen. Axel Krieger, der leitende Forscher, beschreibt die Technologie als „wirklich magisch“ und betont: „Alles, was wir tun, ist, es mit Kameradaten zu füttern, und es kann die für die Operation erforderlichen Roboterbewegungen vorhersagen.“
Für die Tests wurde ein Roboter des Da Vinci Surgical Systems verwendet. Dieses System ist bereits weltweit in der Medizin im Einsatz und ermöglicht präzise Eingriffe. Dabei filmen eingebaute Handgelenkkameras den gesamten Operationsverlauf. Das Team nutzte diese Aufnahmen, um den Roboter in grundlegenden chirurgischen Handgriffen wie dem Umgang mit einer Nadel, dem Anheben von Gewebe und dem Nähen zu schulen.
Ähnliche Architektur wie ChatGPT
Interessanterweise basierte die Software des Roboters auf einer ähnlichen Architektur wie die von ChatGPT. Während ChatGPT allerdings Texte verarbeitet, analysiert das Modell des Roboters Kinematik, also die mathematische Beschreibung von Bewegungen. Dies ermöglicht es dem Roboter, die Winkel und Positionen seiner Instrumente präzise zu kontrollieren. Im Gegensatz zu bisherigen Modellen, die absolute Bewegungen umsetzten, fokussiert sich dieser Roboter auf relative Bewegungen, was eine höhere Genauigkeit erlaubt.
Durch diese Technologie könnten Chirurgie-Roboter zunehmend autonom agieren. Die Entwicklerinnen und Entwickeler sehen das Potenzial, komplexe Eingriffe ohne menschliches Zutun durchführen zu lassen. Ji Woong „Brian“ Kim, einer der Hauptautoren, fasst den Vorteil zusammen: „Alles, was wir brauchen, ist eine Bildeingabe, und dann findet dieses KI-System die richtige Aktion.“
Beeindruckende Testergebnisse
In Tests zeigte der Roboter beeindruckende Ergebnisse: Selbst wenn er eine Nadel fallen ließ, erkannte das System die Situation und hob die Nadel eigenständig auf. Ein Durchbruch, den Axel Krieger als bezeichnend für das Modell ansieht: „Das Modell ist so gut darin, Dinge zu lernen, die wir ihm nicht beigebracht haben.“

Langfristig könnte das Modell die Grundlage für vollständig autonome Operationen bilden. Der Vorteil: Das System könnte innerhalb weniger Tage auf verschiedene Operationen trainiert werden. „Vor diesem Fortschritt musste jeder Schritt manuell programmiert werden“, so Krieger. Dank der neuen Methode lässt sich ein Roboter nun in kürzester Zeit für unterschiedliche Eingriffe vorbereiten.
Ein Beitrag von:













