Roboter lernen, kleine Gegenstände schneller zu greifen
Ein neuer Algorithmus hilft Robotern, ihre Greifwerkzeuge schneller neuen Objekten anzupassen, um diese zu kommissionieren und zu sortieren. Damit könnte sich die Vorlaufzeit bei Umstellungen in der Fertigung verkürzen.
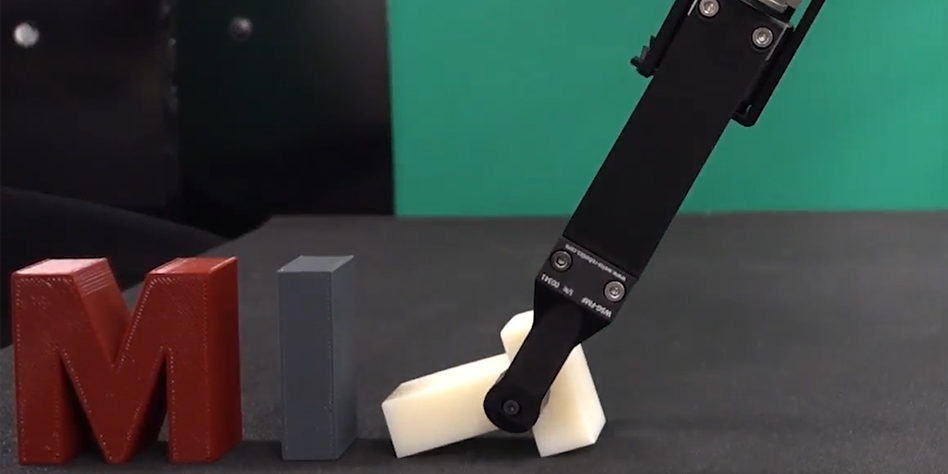
Tests im Labor: Der Roboter-Greifarm kann dank eines neuen Algorithmus unterschiedliche Bewegungen mit kurzem Vorlauf ausführen.
Foto: MIT
Versuchen wir, einen Bleistift zu greifen, fällt uns das nicht sonderlich schwer. Aber für einen Roboter, der beispielsweise einen Behälter mit Objekten durchsuchen und einen bestimmten Gegenstand herausnehmen soll, handelt es sich um einen rechenintensiven Prozess. Noch bevor er die Aktion ausführt, müssen zahlreiche Parameter, etwa die Reibung und Geometrie des Objekts, berücksichtigt werden.
Jetzt haben Ingenieure am Massachusetts Institute of Technology (MIT) einen Weg gefunden, um diesen Vorgang erheblich zu beschleunigen. Während herkömmliche Algorithmen für die Planung eines Bewegungsablaufs mindestens 10 Minuten benötigen, reduziert ihr Ansatz die Planungszeit auf weniger als 1 Sekunde.
Der Bewegungskegel als neues Modell für Rechenvorgänge
Zum Hintergrund: Bekannte Algorithmen für Roboter benötigen viel Zeit, um einen neuen Bewegungsablauf für den Greifroboter zu planen. Sie müssen zahlreiche physikalische Gesetze berücksichtigen, um die Geometrie und die Reibung zwischen verschiedenen Oberflächen in ihr Kalkül zu ziehen. „Es ist ein mühsamer Rechenprozess, alle physikalischen Gesetze zu integrieren, alle möglichen Bewegungen des Roboters zu berücksichtigen und eine nützliche unter ihnen auszuwählen“, sagt Alberto Rodriguez. Er ist Professor für Maschinenbau am MIT.
Rodriguez uns seine Kollegen haben einen besseren Weg gefunden, um die Rahmenbedingungen zu berücksichtigen, bevor sie entscheiden, wie sich die Hand des Roboters bewegen soll. Sie verwendeten dazu sogenannte Bewegungskegel, also kegelförmige Visualisierungen aller Reibungsvorgänge beim Greifen.
Greifvorgänge: Kleine Veränderung – große Wirkung
Das Innere des virtuellen Kegels zeigt alle Schubbewegungen, die auf einen Gegenstand an einer bestimmten Stelle wirken, während die grundlegenden Gesetze der Physik eingehalten werden und der Roboter in die Lage versetzt wird, das Objekt festzuhalten. Der Raum außerhalb des Kegels repräsentiert alle Stöße, die dazu führen würden, dass ein Objekt aus dem Griff des Roboters rutscht.



Auf Basis dieser Theorie berechnet ein neuer Algorithmus mögliche Bewegungskegel für verschiedene Konfigurationen zwischen dem Robotergreifer, dem Objekt, das er halten soll, und der Umgebung, gegen die er drückt.
„Scheinbar einfache Variationen, wie zum Beispiel das Fassen des Objekts durch einen Roboter mit hartem oder weichem Greifarm, können die Bewegung des Objekts erheblich verändern“, erklärt Rachel Holladay, Doktorandin der Elektrotechnik und Informatik am MIT. „Je nachdem, wie fest der Greifer Gegenstände packt, wird es andere Muster geben. Und das ist Teil des physikalischen Denkens, mit dem der Algorithmus umgeht.“
Erste Untersuchungen im Labor
Die Forscher testeten ihren neuen Algorithmus an einem physikalischen Aufbau mit einer Drei-Wege-Interaktion, bei der ein handelsüblicher Robotergreifer einen T-förmigen Block halten und gegen eine vertikale Stange drücken sollte. Sie verwendeten unterschiedliche Parameter für die Startposition und den Winkel zwischen Objekt und Stange. Für jede Konfiguration erzeugte der Algorithmus sofort einen Bewegungskegel mit allen möglichen Kräften zur erfolgreichen Ausführung des Vorgangs.
„Wir haben mehrere tausend Versuche unternommen, um zu überprüfen, ob unser Modell Vorgänge aus der Praxis korrekt prognostiziert“, so Holladay. „Wenn wir einen Druck ausüben, der sich innerhalb des Kegels befindet, sollte das Objekt unter der Kontrolle des Roboters bleiben. Und wenn wir uns außerhalb des Kegels befinden, sollte es aus dem Greifer rutschen.“
Im Labor stellten die Forscher fest, dass alle Vorhersagen des Algorithmus zuverlässig mit dem Ergebnis ihrer Experimente übereinstimmten. Sie planten Bewegungsabläufe – beispielsweise die Neuausrichtung des Blocks gegen die Stange, bevor er in aufrechter Position auf einen Tisch gestellt wurde – in weniger als einer Sekunde im Vergleich zu einem kommerziellen Algorithmus, der 500 Sekunden lang rechnen musste.
Der nächste Schritt: Anwendung in der Industrie
Die Forschergruppe am MIT will jetzt ihren Algorithmus weiterentwickeln, damit ein Roboter verschiedene Werkzeuge handhaben kann, beispielsweise in einer Fertigungsstraße.
„Die meisten Fabrikroboter, die Werkzeuge verwenden, haben eine speziell entwickelte Hand. Statt einen Schraubendreher zu greifen und ihn auf viele verschiedene Arten zu verwenden, machen sie die Hand einfach zu einem Schraubendreher“, berichtet Holladay. „Geschickter wäre, dass ein Roboter viele verschiedene Werkzeuge benutzen und aufnehmen kann.“ Dies führe zu mehr Flexibilität und spare Zeit.
Mehr zum Thema Roboter:
Ein Beitrag von: