Vierbeiniger Roboter liefert Wissen für die Welt
Die Robotik ist ständig im Wandel – bald täglich werden neue Ergebnisse veröffentlicht. Um möglichst viele Experten der weltweiten Community zu beteiligen, haben Forscher ein System entwickelt, das sie anderen Arbeitsgruppen anbieten.
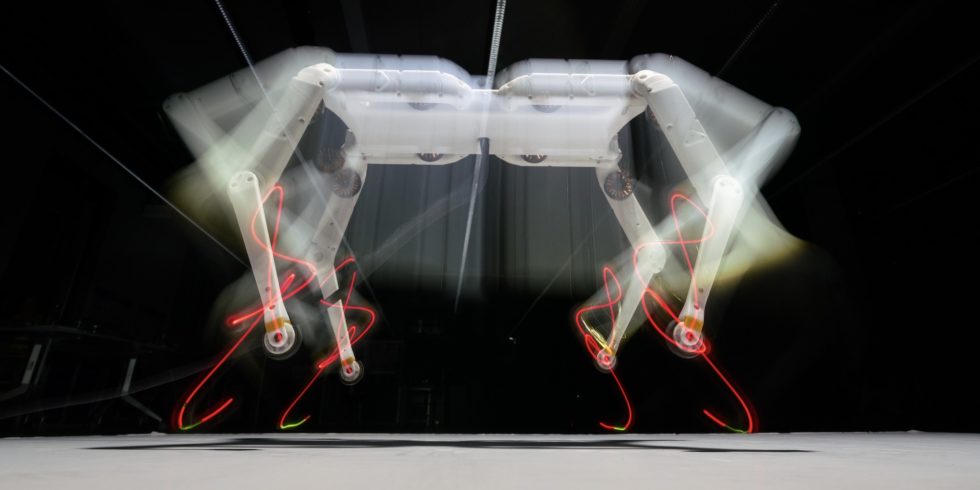
Der vierarmige Roboter Solo 8 springt aus dem Stand in die Höhe: ein Bewegungsmuster, das man von Hunden kennt.
Foto: Max-Planck-Instituts für Intelligente Systeme / W. Scheible/MPI für Intelligente Systeme
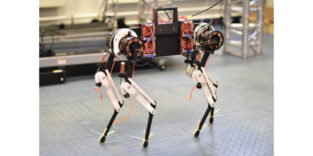
Ingenieure des Max-Planck-Instituts für Intelligente Systeme (MPI-IS) und der New York University haben einen agilen, vierbeinigen Roboter entwickelt. Einerseits setzen sie spezielle Bewegungsmuster erfolgreich um, die man von Tieren kennt. Andererseits handelt es sich um ein Open-Source-Projekt, um Technologien weiteren Robotik-Labors zur Verfügung zu stellen – etwa zur Grundlagenforschung oder zur Schulung von Studierenden.
Die benötigten Teile können vor Ort im 3D-Druck hergestellt oder für wenig Geld erworben werden. Sowohl die Konstruktionsanleitung als auch die Dokumentation wurde unter einer Open Source-Lizenz veröffentlicht. „Unsere Roboterplattform ist eine hervorragende Basis für andere Forscher, um schnell einen Prototypen zu bauen“, sagt Ludovic Righetti. Er ist Associate Professor an der Tandon School of Engineering der New York University und Forschungsgruppenleiter am MPI-IS. „Im Gegenzug profitieren wir davon, weil komplexe Steuerungs- und Lernalgorithmen schnell auf der Plattform getestet werden können. So verkürzt sich die Zeit von der Idee bis zur experimentellen Validierung.“
Mit dem Roboter „Gassi gehen“
Zum Hintergrund: Solo 8 ist ein drehmomentgesteuerter, vierbeinige Roboter. Seine Bewegungsmuster erinnern an junge Hunde, die sich freuen, weil der tägliche Spaziergang naht. Dieses Verhalten haben Entwickler technisch nachgebildet. Ihr Roboter bewegt sich auf vier Beinen und kann aus dem Stand heraus hüfthoch springen. Er landet jedoch nicht hart, sondern federt den Sprung ab, um wieder sicher auf dem Boden zu landen.
Auch hier halfen bewährte Strukturen, die man von biologischen Strukturen kennt. Knochen entsprechen bei Solo 8 den Roboterarmen. Die Aufgaben von Muskeln oder Sehnen übernehmen Drehmoment-gesteuerte Motoren. Um besser auf unterschiedliche Situationen reagieren zu können, wurden keine normalen Federn, sondern virtuelle, frei programmierbare Federn verbaut. Ihre Federsteifigkeit kann von weich bis hart verändert werden. Das entspricht ebenfalls Mustern im menschlichen oder tierischen Körper.
Geringes Gewicht, hohe Beweglichkeit
Die Entwickler haben auch darauf geachtet, möglichst leichte, aber stabile Bauteile zu verwenden. Gerade zwei Kilogramm bringt ihr Roboter auf die Waage – deutlich weniger als vergleichbare Systeme. Das macht Solo 8 flexibler, aber auch praxistauglicher. Man kann den Roboter in einen Rucksack packen und zum Einsatzort bringen.



Die Ziffer „8“ in seinem Namen deutet auf acht Gelenke des Roboters hin. Das Pendant bei Tieren sind Hüfte und Knie in jedem Bein. Künftig wollen die Entwickler ein System mit zwölf Freiheitsgraden, also drei pro Bein, entwickeln. Sein Name steht schon fest: Solo 12.
Plattform zur weltweiten Entwicklung
Seit Beginn haben die Forscher ihr Projekt als Entwicklungsplattform konzipiert. Ziel ist, dass sich möglichst viele Labors mit ihrer Expertise einbringen. Davon profitieren beide Seiten.
„Eine Forschungsgruppe, die einen solchen Roboter selbst entwickeln würde, bräuchte dafür etwa vier Jahre“, sagt Alexander Badri-Spröwitz. Er ist Leiter der Forschungsgruppe Dynamische Lokomotion am MPI-IS. „Außerdem braucht man ein breites Spektrum an Fachwissen.“
Hingegen stellen die MPI-IS-Experten auf ihrer Solo-8-Plattform alle Informationen online bereit. Jedes Team kann Dateien herunterladen und per 3D-Druck selbst produzieren. Zusammen mit wenigen Komponenten, die man kaufen muss, entsteht der Roboter für eigene Experimente – bei vergleichsweise niedrigen Kosten. Ergebnisse der eigenen Forschung werden dann mit der weltweiten Community geteilt: eine Win-Win-Situation.
Robotik: Systematische Vorbereitung
Doch der Erfolg stellte sich nicht von heute auf morgen ein. Bereits im Jahr 2016 haben deutsche und amerikanische Wissenschaftler die Open Dynamic Robot Initiative ins Leben gerufen. Im Laufe der Jahre kamen weitere Experten aus dem Maschinenbau, der Mechatronik, der Elektrotechnik und der Informatik mit hinzu.
Den nächsten Meilenstein erreichte das Team im Jahr 2018. Damals bewegte sich Solo 8 erstmals durch das Labor. Nach weiteren Verbesserungen wird das System auf der International Conference on Robotics and Automation (ICRA) vorgestellt. Wegen der Corona-Pandemie findet die weltweit größte Robotik-Messe dieses Jahr nur virtuell statt.
Zum Open-Source-Projekt gelangen Sie hier.
Mehr zum Thema Roboter in Forschung und Anwendung:
Ein Beitrag von: