Astronaut auf ISS lenkt per Weltraum-Internet Mars-Rover auf der Erde
Zum zweiten Mal ist es gelungen, von der ISS einen Roboter auf der Erde zu steuern. Der Astronaut Tim Peake hat den sechsrädrigen Rover Bridget über ein Testgelände in der Nähe von London gefahren. Auch simulierte Probleme konnte das Team bewältigen. Der Versuch ist eine wichtige Vorbereitung für Langzeitmissionen zum Mars.

Versuch geglückt: Der Mars-Rover Bridget fuhr am Wochenende durch ein Testgelände in der Nähe von London, ferngesteuert per Joystick durch den Astronauten Tim Peake auf der ISS.
Foto: Max Alexander/Airbus Defence and Space 2016/dpa
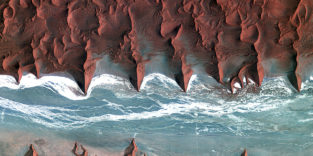
In Stevenage nahe London ist ein Stückchen Mars zu bewundern. Die originalgetreu nachgebaute Oberfläche des roten Planeten ist eine Experimentierfläche für eine mögliche Mars-Expedition. Die Astronauten, die diese jahrelange Tortur auf sich nehmen, sollen den Mars-Rover hinunterschicken, bevor sie selbst ihren Fuß auf den Mars setzen.
Ferngesteuert von den Astronauten im Raumschiff, das den Mars umkreist, soll es zunächst die Oberfläche erkunden, bevor die Besatzung landet. Das Problem dabei: Während der Rover auf dem Mars ferngesteuert agiert, kann es zu Unterbrechungen der Kommunikation kommen. Das soll das 154 kg wiegende Gefährt, entwickelt von Airbus Defense & Space, mit seinen sechs höchst beweglichen Rädern aber nicht aus der Bahn werfen. In eingeschränktem Maße kann es selbstständig navigieren.
Versuch klappte sogar in einer dunklen Höhle
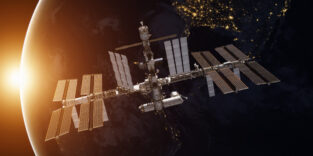
Dass es funktioniert, hat am Wochenende der britische Astronaut Tim Peake gezeigt. Von der Internationalen Raumstation (ISS) aus lenkte er den auf den Namen Bridget getauften Mars-Rover mit Hilfe eines Joysticks 90 Minuten lang über das Testgelände in Stevenage in der Nähe von London. Schon 2013 hatte der Rover in der chilenischen Atacama-Wüste eine harte Testreihe überstanden – damals aber noch nicht ferngesteuert aus dem All.
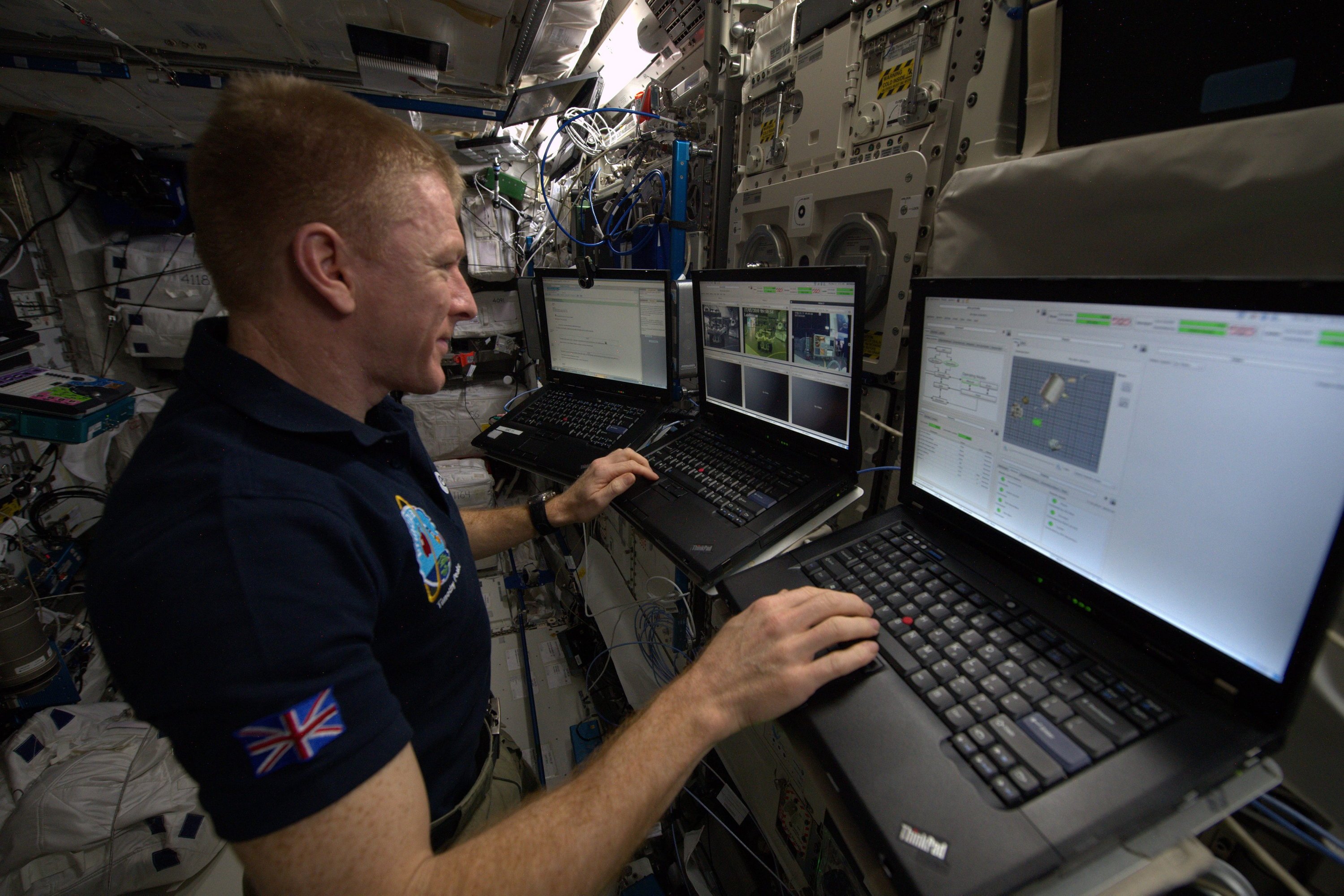
Der britische Astronaut Tim Peake steuerte den Mars-Rover auf der Erde direkt aus der ISS. Mit dieser Technik sollen Astronauten auf einer Mars-Mission erst einmal die Mars-Oberfläche untersuchen können, bevor sie selbst landen.
Quelle: ESA/NASA/dpa
Eine Zeit lang rollte das Gefährt sogar selbstständig durch eine Höhle. Zwei mit ein paar Dutzend Leuchtdioden bestückte Scheinwerfer hellten dabei das Dunkel auf.
Rover sind Pfadfinder und Spürhunde auf dem Mars
Die Kommunikation lief über eine Art Internet im All. Während der Testfahrt simulierten die Experimentatoren kurzzeitige Ausfälle und Verzögerungen, wie sie im realen Einsatz erwartet werden. Das brachte den Roboter, der eine Spitzengeschwindigkeit von 1,2 Metern pro Minute hat, nicht vom Kurs ab.
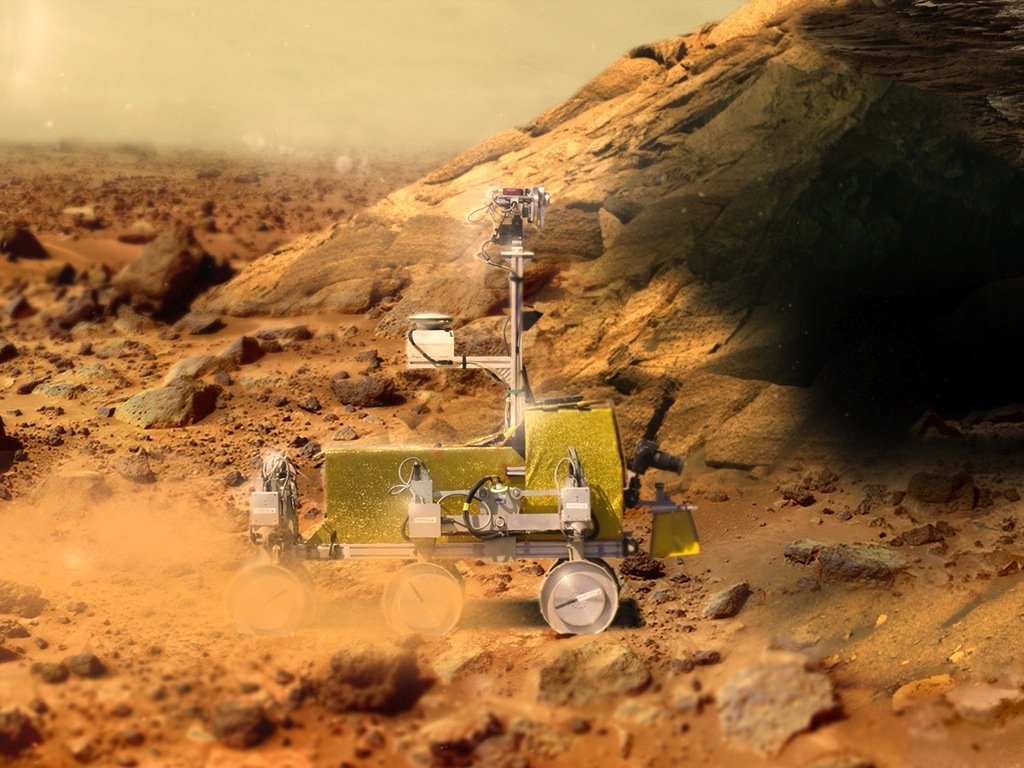
Der Mars-Rover Bridget wurde von Airbus entwickelt und kann sich mit seinen sechs Rädern auch in schwierigem Gelände bewegen.
Quelle: Airbus D&S/ESA
„Künftige Missionen ins Sonnensystem erfordern die Zusammenarbeit von Menschen und Robotern, die als unsere Pfadfinder und Spürhunde fungieren, um wissenschaftliche und technische Informationen zu sammeln“, sagt Philippe Schoonejans, der bei der Europäischen Raumfahrtorganisation (ESA) für den Einsatz von Robotern im Weltraum und für Zukunftsprojekte zuständig ist. Das ESA-Kontrollzentrum in Darmstadt überwachte das Experiment.
Reaktionszeit von 24 Minuten
Zu diesen Zukunftsprojekten zählt Meteron. Dabei geht es um Mars-Fahrzeuge, die die Oberfläche des Mars untersuchen und für die Landung der Astronauten vorbereiten sollen. Diese Rover von der Erde aus zu steuern, ist kaum möglich, weil die Signale mindestens zwölf Minuten brauchen, um auf dem Mars anzukommen. Rechnet man die Antwort hinzu, dauert es also wenigsten 24 Minuten, ehe die Bodenstation reagieren kann. Deshalb sollen Astronauten im Orbit des Mars die Fernsteuerung übernehmen.
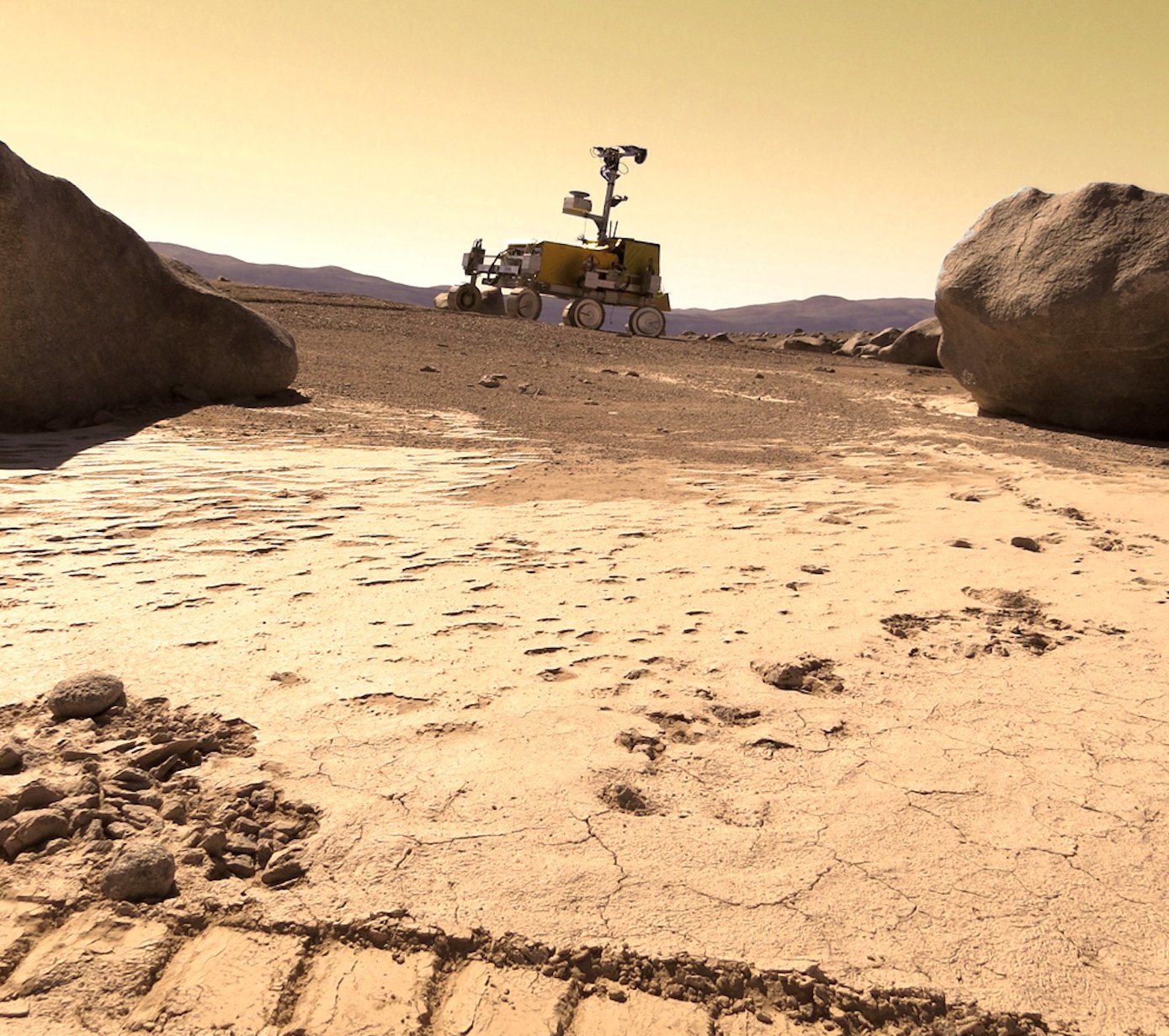
Der Mars-Rover Bridget wurde schon Ende 2013 in der chilenischen Atacama-Wüste getestet, deren Beschaffenheit ebenfalls der Mars-Oberfläche ähnelt.
Quelle: E. Allouis/Astrium
Der geglückte Versuch war allerdings nicht der erste: Im Sommer vergangenen Jahres lenkte der russische Kosmonaut Oleg Kononenko per Joystick einen Roboter im DLR-Zentrum in Oberpfaffenhofen.
Ein Beitrag von: