Exaktes 3D-Modell vom Landeplatz auf dem Mars
Die europäische Weltraumagentur ESA plant für 2021 eine Landung auf dem Mars. Damit der Rover Rosalind Franklin sicher landen kann, entwickelten Forscher der Technischen Universität (TU) Dortmund ein genaues 3D-Modell vom Landeplatz.

Eine neue Technik soll die Landung des Marsrover sicherer machen.
Foto: panthermedia.net/jamesgroup
Es geht darum, die Geographie und geologischen Eigenschaften der Region zu verstehen. Das soll die Planbarkeit rund um den Standort des Rovers mit Namen Rosalind Franklin verbessern. Schließlich sind alle Beteiligten am Erfolg der Marsmission interessiert. Der Rover ist ein ferngesteuertes Fahrzeug, das eigens für die Erkundung des Mars entwickelt worden ist. Seit Beginn der 1970er-Jahre steuern die einzelnen Raumfahrtagenturen aus aller Welt den entfernten Planeten an. Bereits viermal gelang es, einen Rover auf den Mars zu schicken. Die Fahrzeuge sind ausgestattet mit diversen Messgeräten und Werkzeugen. In der Regel werden sie per Funk von der Erde aus gesteuert und übermitteln auf diesem Weg auch die gesammelten Daten und Messergebnisse. Zum Teil werden die Rover auch mit eigenständigen Fähigkeiten entwickelt, sodass sie durchaus autonom arbeiten können.
Bilder berücksichtigen Eigenschaften der Atmosphäre
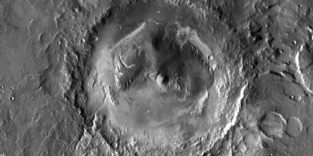
Den Wissenschaftlern der TU Dortmund von der Fakultät für Elektrotechnik und Informationstechnik (ETIT) gelang es nun, die Genauigkeit der Modelle zu verbessern. Dafür entwickelten sie eine neue Technik, mit der sie die Eigenschaften der Planetenatmosphäre bei der Konstruktion der digital erzeugten Szenen berücksichtigen. Auf diese Art und Weise erreichen die Modelle eine Auflösung von 25 Zentimetern pro Pixel. Hochauflösende Marsbilder des HiRISE-Instruments auf dem Erkundungssatelliten „Mars Reconnaissance Orbiter“ der Nasa liefern die Basis für die digitalen Geländemodelle.
HiRISE bedeutet „High Resolution Imaging Science Experiment“ und ist eine besonders leistungsfähige Kamera, die 2005 auf die Reise zum Mars geschickt wurde und seit 2006 relativ zuverlässig Bilder vom Planeten zur Erde schickt. Bislang wurde diese Art von Bildern mit der klassischen Stereomethode bearbeitet. Das heißt: Man kombiniert 2 Bilder aus leicht verschiedenen Winkeln miteinander. Daraus lässt sich dann ein 3D-Bild der Landschaft erstellen. Diese Technik gerät jedoch rasch an ihre Grenzen, wenn man sie bei Regionen anwendet, deren landschaftlichen Begebenheiten sehr gleichmäßig oder besonders ähnlich sind. Wie eben die staubige und sandige Planetenoberfläche rund um den Landeplatz des Rovers.
Schatten als Datenbasis
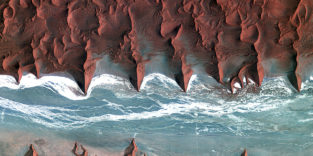
Für die Verbesserung der digitalen Geländemodelle nutzte das Team der TU Dortmund die Technik „Shape from Shading“. Dabei wird die Intensität des reflektierten Lichts im Bild in Daten umgewandelt, die somit Steigung und Gefälle der Oberfläche darstellen. Diese gewonnenen Informationen fügen die Wissenschaftler in die Stereobilder ein. So fließen auch Unebenheiten in die Bilder mit ein. Sie ermöglichen am Ende eine bessere Einschätzung der 3D-Oberfläche und eine möglichst genaue Auflösung in der rekonstruierten Landschaft. „Mit dieser Technik können sogar kleinräumige Details wie Sandverwehungen in Kratern und raues Grundgestein reproduziert werden“, sagt Kay Wohlfahrt, Experte für Bildsignalverarbeitung an der Fakultät ETIT.
„Oxia Planum“ als Landeplatz ausgewählt
Für 2021 plant die europäische Weltraumagentur ESA die nächste Erkundungsmission des Mars. Der Rover soll im Rahmen des sogenannten ExoMars-Projekts die Oberfläche des Planeten erforschen. Dabei arbeitet die ESA mit der russischen Raumfahrtagentur Roskosmos zusammen, die unter anderem die Trägerrakete für den Rover entwickelt hat. Er wird für die Mission mit einer Reihe wissenschaftlicher Instrumente ausgestattet, mit denen er Analysen der Oberflächenumgebung und Gesteine durchführen kann. Dazu gehört zum Beispiel ein Bohrer, mit dem er unter die Oberfläche gelangt. Ausgelegt ist er auf die Suche nach Untergrundwasser und Lebensspuren.
Der Landeplatz für den Rover Rosalind Franklin ist bereits ausgewählt. Es ist das Gebiet mit Namen „Oxia Planum“. Der Grund für diese Wahl: Die Region ist vergleichsweise flach. Dadurch erhofft sich die ESA, das Risiko einer harten Landung reduzieren zu können, sodass der Rover nach der geglückten Landung auch seine Mission erfüllen kann. Die Landung zählt mit zu den größten Schwierigkeiten im Rahmen der Marserkundung. Anfang der 1970er-Jahre missglückte aufgrund des Sturzes bei der Landung der erste Versuch der damaligen Sowjetunion. Das von der ESA ausgewählte Gebiet „Oxia Planum“ ist auch für Wissenschaftler interessant, weil hier alte Flussbetten vermutet werden, deren Tonmineralien und Strukturen eventuell Hinweise auf Lebensspuren aus der Vergangenheit geben können.
Mehr zu diesem Thema:
Ein Beitrag von: