Weltraumrobotik soll bis in die Tiefsee vordringen
Vom Weltraum für die Erde lernen, das ist das Ziel von „TransTerrA“. Das ambitionierte Projekt soll zeigen, wie sich die Weltraumrobotik zum Beispiel bei Katastrophenereignissen auf Erden nutzen lassen kann. Das Bundesministerium für Wirtschaft und Technologie fördert diese Idee für die nächsten vier Jahre mit knapp acht Millionen Euro.
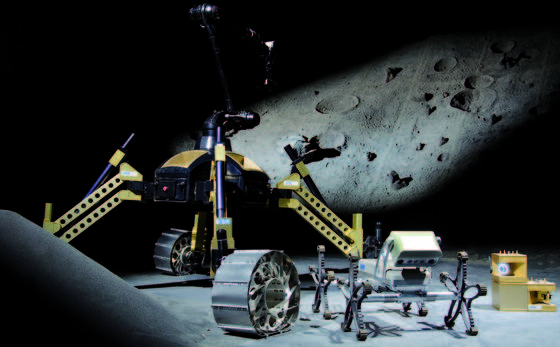
Der Mondrover Sherpa, der Laufroboter Asguard sowie Kommunikationsmodule (v.l.n.r.) zählen zu den DFKI-Systemen, die im Projekt TransTerrA weiterentwickelt und auf irdische Anwendungsfelder übertragen werden.
Foto: DFKI GmbH
Es gibt Orte auf der Erde da kann und will niemand wirklich sein und arbeiten. In einem havarierten radioaktiv verseuchtem Kernkraftwerk zum Beispiel. Oder in gigantischer Tiefe am Meeresboden bei der Öl- oder Gasförderung. Diese Arbeitsplätze überlässt der Mensch lieber seinen Blechkollegen, den Robotern. Damit die Maschinen diese schwierigen Arbeiten in Zukunft noch sehr viel besser erledigen können, soll jetzt die Weltraumrobotik helfen. Zu diesem Zweck fiel am 22. Mai 2013 der offizielle Startschuss für „TransTerrA“. Das auf vier Jahre angelegte Projekt des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) wird vom Bundesministerium für Wirtschaft und Technologie (BMWi) mit 7,9 Millionen Euro über das Deutsche Zentrum für Luft- und Raumfahrt (DLR) gefördert. Das Ziel ist einfach und anspruchsvoll zugleich: „TransTerrA“ soll Raumfahrttechnologien auf irdische Anwendungen übertragen.
Erkenntnisse aus extremer Umgebung im All auf der Erde nutzen
„‘TransTerrA‘ ist ein Wegweiser in der Umsetzung der nationalen Raumfahrtstrategie. Wir verfolgen das Ziel, die Schlüsseltechnologie Robotik nicht nur für die Raumfahrt zu nutzen, sondern auch in industrielle Anwendungen auf der Erde umzusetzen. Das stärkt den Wirtschaftsstandort Deutschland“, sagte Dr. Sven Halldorn, Leiter der Abteilung Technologiepolitik im BMWi: „Hierzu leistet das DFKI mit seiner herausragenden Robotik-Expertise einen wichtigen Forschungsbeitrag.“ Das DFKI – mit Sitz in Kaiserslautern, Saarbrücken, Bremen sowie einem Projektbüro in Berlin – ist das weltweit größte Forschungszentrum auf dem Gebiet der Künstlichen Intelligenz.
Vom Weltraum lernen, darum geht es bei „TransTerrA“: Die extremen Temperaturschwankungen im Orbit, die radioaktive Strahlung, das Vakuum – das sind die Extreme des Alls, mit denen robotische Raumfahrtsysteme zurechtkommen müssen. „Das hohe Transferpotential robotischer Raumfahrtsysteme liegt in ihrer Robustheit und Automation“, betonte Bernd Sommer vom DLR Raumfahrtmanagement: „Sie funktionieren eigenständig sowie ohne Wartung über lange Zeiträume und Entfernungen.“
Exoskelette sollen in der Reha für Schlaganfallpatienten zum Einsatz kommen
Es geht bei diesem Wissenstransfer vom Weltall auf die Erde nicht nur um havarierte Kernkraftwerke oder Ölbohrungen in der Tiefsee. So sollen auch in der medizinischen Rehabilitation intelligente Mensch-Maschine-Schnittstellen wie Exoskelette, die zur Fernsteuerung von Systemen im All dienen, Schlaganfallpatienten helfen, Bewegungen neu zu lernen.

Professor Dr. Frank Kirchner, Dr. Sven Halldorn und Bernd Sommer (v.l.n.r.) geben in der Weltraum-Explorationshalle des DFKI den Startschuss zum TransTerrA-Projekt.
Quelle: DFKI GmbH
Im Rahmen des Projekts „TransTerrA“ entwickeln die Forscher am DFKI ein Szenario, in dem ein Roboterteam die Mondoberfläche erforscht. Im Focus steht die Zusammenarbeit verschiedener Robotersysteme. Denn eine Weltraummission kann heute nicht mehr von einem robotischen System alleine gestemmt werden. Die Experimente werden immer aufwändiger, so dass komplexe robotische Missionen an Bedeutung zunehmen. Konkret sollen im „TransTerrA“-Szenario ein Rover und ein Shuttle zusammenwirken. Die Aufgabe des Shuttles ist die Versorgung des Rovers. Hierfür ist der Aufbau zuverlässiger Versorgungswege über mehrere Stationen hinweg notwendig.
Komplexe Logistikkette mit kompatiblen Schnittstellen
Für den Aufbau einer Logistikkette werden so genannte Base-Camps eingesetzt, um große Entfernungen zwischen Lander und Rover überbrücken zu können. Die Base-Camps dienen dabei verschiedenen Aufgaben. Mal handelt es sich um ein Depot für Energie oder Bodenproben, mal ist es eine Relaisstation für Kommunikation. Je nach Aufgabe erhalten die Base-Camps Funktionsmodule. Alles ist mit kompatiblen Dockingschnittstellen ausgestattet, somit ist eine Kommunikation der Roboter untereinander, also zwischen Shuttle und Rover, möglich.
Über allem thront jedoch der Mensch. Denn menschliche Operatoren – im Szenario auf der Erde postiert – können über neuartige Mensch-Maschine-Schnittstellen mit intuitiven Bewegungen in die Mission eingreifen. Der Missionsleitstand, die Schnittstelle zwischen menschlichem Operator und Explorationsroboter, besteht aus einem Oberkörper-Exoskelett zur Steuerung der Systeme. Darüber hinaus verfügt der Leitstand über moderne Visualisierungsmethoden, wie dreidimensionalen Multiprojektionsflächen und Head-mounted Displays.
Demonstration der Ergebnisse in riesigem Unterwasserbecken
Die Ergebnisse und die Systeme aus dieser Mond-Expedition sollen parallel auf andere Szenarien auf der Erde übertragen werden. Shuttle und Rover können in der Tiefsee zur nachhaltigen Ressourcengewinnung oder zur Überwachung und Inspektion von Tiefsee-Anlagen eingesetzt werden. Das demonstrieren die Forscher im 3840 Kubikmeter großen Unterwasserbecken im Bremer DFKI-Neubau. Für das Szenario Katastrophenfall, zum Beispiel ein havariertes Kernkraftwerk, dient ein schwer zugängliches Gelände. Dort müssen die Systeme ihren Weg zum Einsatzort eigenständig finden und operieren. Sie können dort Türen öffnen, die Lage erkunden und zum Beispiel die ausgetretene Radioaktivität messen.
Mit ihrem in der Mond-Expedition eingesetzten und getesteten Exoskelett wollen die DFKI-Forscher auch ihren Beitrag zur immer stärker alternden Gesellschaft leisten. Denn der Bedarf an intelligenten Assistenzsystemen steigt, weil chronische Erkrankungen des Bewegungsapparats und des Nervensystems zunehmen. Das DFKI demonstriert im Rahmen von „TransTerrA“, dass ein Exoskelett im Alltag und zur Rehabilitation eingesetzt werden kann. Dabei übermitteln physiologisch erhobene Daten wie EEG und Eye-Tracking den kognitiven Zustand des Patienten. Dadurch erkennen die Forscher die Intention des Patienten, der zum Beispiel zur Toilette gehen möchte. Das Exoskelett unterstützt dann die Bewegungsabläufe des Oberkörpers.
Mit dem Projekt „TransTerrA“ versucht das DFKI zu beweisen, dass Weltraumtechnik nicht nur teurer Selbstzweck ist, sondern durchaus auch auf der Erde sinnvolle Dienste leisten kann. Die Raumfahrtrobotik ist schon seit dem Jahr 2009 ein Schwerpunkt des Nationalen Programms für Weltraum und Innovation, für dessen Umsetzung das DLR-Raumfahrtmanagement zuständig ist.
Ein Beitrag von: