Autonom im Schwarm unterwegs
Autonome Unterwasserfahrzeuge (AUV) sind recht neu und können im nassen Revier sehr viele Aufgaben völlig alleine erledigen. An der Kieler Universität begleiten die AUVs jetzt Studierende bei ihren Abschlussarbeiten. Die AUVs aus Kiel sind als Schwarm organisiert und können sich untereinander verstehen.
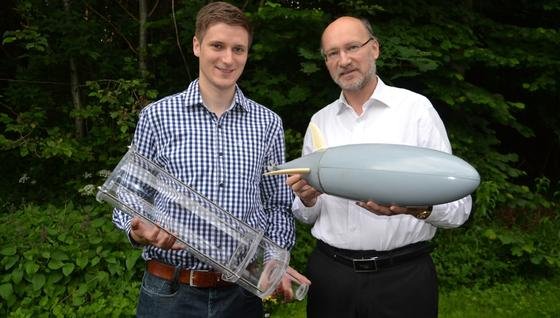
Projektkoordinator Sven Leitsch (li.) präsentiert zusammen mit Professor Peter Adam Höher die autonomen Unterwasservehikel „Plexi“ und „Kugelfisch“.
Foto: Uni Kiel/Raissa Nickel
„Plexi“ und „Kugelfisch“ sind Teil eines Teams und kommen viel rum. Die beiden Geräte mit den lustigen Namen sind autonome Unterwasservehikel (AUV) und arbeiten im Dienst der Lehre und Forschung der Kieler Christian-Albrecht-Universität (CAU). In zwölf Teilprojekten untersuchen und realisieren die Teilnehmenden studienbegleitend im Bachelor- und Masterprogramm multiple Lösungsvorschläge für die AUVs. „Die autonomen Unterwasservehikel bieten eine attraktive Lehre und eine Fülle an Möglichkeiten, um Studierende zu begeistern und Eigenverantwortung zu stärken. Zudem sind sie eine Plattform für wissenschaftliche Interessen“, fasst Adam Höher, Professor am Institut für Elektrotechnik und Informationstechnik am CAU die Arbeit im Projekt der Technischen Fakultät zusammen.
Viel Raum für Ideen
Der Student des Wirtschaftsingenieurwesens Sven Leitsch koordiniert das AUV-Projekt. Er hat zusammen mit 25 Studierenden und fünf wissenschaftlichen Mitarbeitern unter anderem „Plexi“ und „Kugelfisch“ entworfen und gebaut. Und ist weiter mit Begeisterung dabei: „Teilweise kommen einen in der Freizeit phantastische Ideen, die wir als nächstes in Angriff nehmen können“, schwärmt Leitsch.
Um all diesen vielen phantastischen Ideen viel Raum zu bieten, sind die AUVs recht einfach gehalten und nicht mit Technik vollgestopft. Hinten im AUV sitzen der Motor und die für die Steuerung notwendigen beweglichen Finnen. Daneben beherbergt das AUV im hinteren Teil eine von den Studenten selbstständig programmierte Antriebseinrichtung mit einer Rechnereinheit. Vorne ist Platz für modular austauschbare Sensoren und Elektronik.
Wasser dämpft die Funkwellen
Ein großes Problem für autonome Unterwasserfahrzeuge ist die Kommunikation unter Wasser. „Im Wasser zu kommunizieren und über weite Distanzen Inhalte zu senden, ist sehr schwierig. Die Dämpfung von Signalen ist das Hauptproblem und die Physik der Unterwasserkommunikation schreibt uns Grenzen vor“, erklärt Professor Höher.
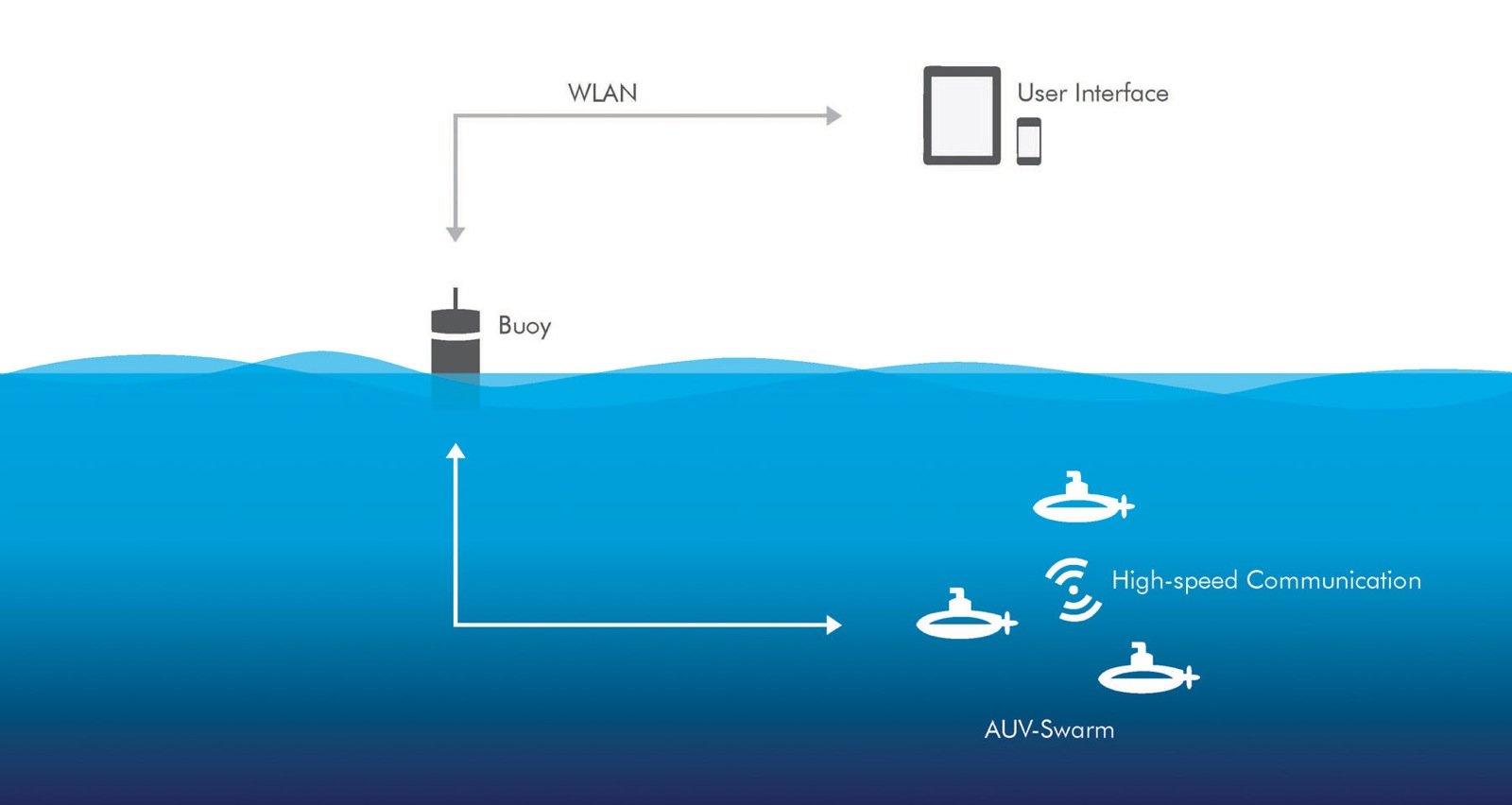
Die Grafik illustriert das Kommunikationsmodell eines Schwarms von autonomen Unterwasservehikeln. Ausgehend von einem Tablet, Handy oder PC wird eine Verbindung zur Boje mit konventioneller Technik (WLAN) aufgenommen. Die Daten werden in der Distanzkommunikation von der Boje zum Schwarm gesendet und innerhalb des Schwarms in Hochgeschwindigkeit übertragen.
Quelle: Uni Kiel/Sven Leitsch
Das Team um Höher hat sich eine pfiffige Lösung für das Problem der Unterwasserkommunikation ausgedacht. Mehrere AUVs bilden zusammen einen navigierbaren Schwarm. So können die Kieler Forscher die starke Absorption der Funksignale durch das Wasser überlisten. „Hier liegt ein Vorteil der Schwarm-Idee“, freut sich Adam Höher. Sven Leitsch ergänzt: „Durch die Existenz mehrerer Vehikel können wir diese Problematik ganz neu aufrollen und neue Ansätze in der Nahbereichs- wie auch Distanzkommunikation, wie es bereits durch den Test einer Magnetfeldkommunikation geschah, verfolgen.“
Boje dient als Vermittlungs-Schnittstelle
Schritt eins im Kommunikationsgeschehen ist per Smartphone oder Tablet über WLAN eine Verbindung zur Boje, die auf der Wasseroberfläche schwimmt und als Vermittlungs-Schnittstelle zum Schwarm fungiert. Die Boje hält dann im zweiten Schritt die Verbindung zum Schwarm, der unter sich eine Hochgeschwindigkeits-Kommunikation aufrechterhalten kann.
Der AUV-Schwarm regelt alle für den programmierten Einsatz notwendigen Schritte und Bewegungen völlig selbstständig. So kann der AUV-Schwarm zum Beispiel eine 3D-Grafik einer Unterwasserpipeline erstellen. Dabei können aus verschiedenen Winkeln Fotos zu einem virtuellen Raum zusammengefügt werden, die mittels Fernübertragung von einem Begleitschiff ausgewertet werden.
„Die Einsatzmöglichkeiten sind fast unbegrenzt“, sagt Adam Höher. So lassen sich Unterwasser-Abstandsmesser wie im Automobilbau realisieren, Warnsysteme vor Wassereinbruch sind denkbar oder auch Umweltbeobachtung durch Unterwasserproben. So flexibel und modular sind die AUVs echte kleine Alleskönner unter Wasser.
Suche nach Flugzeugwrack war AUV-Premiere
Wozu solche AUVs in der Lage sind, zeigt der weltweit erste Einsatz solcher autonomen Unterwasserfahrzeuge: In der Nacht vom 31. Mai zum 1. Juni 2009 stürzte eine Air-France-Maschine auf dem Flug von Rio de Janeiro nach Paris vor der Küste Brasiliens in den Atlantik. Bei diesem Absturz des Airbus A330-200 kamen alle 228 Insassen ums Leben. Es war der bisher schwerste Unfall in der Geschichte der Air France. An der Absturzstelle ist der Ozean bis zu 4000 Meter tief, entsprechend kompliziert gestaltete sich die Suche nach dem Flugzeug am Meeresboden.



Erstmals kamen dabei autonome Unterwasservehikel zum Einsatz. Die vier Meter langen, zigarrenförmigen Geräte können in Tiefen bis zu 6000 Metern relativ große Flächen untersuchen. Für die Wracksuche wurden drei AUVs, eines kam damals vom Kieler Institut für Meereswissenschaften (IFM-GEOMAR), als Schwarm auf die Reise in die Tiefsee geschickt. Sie kommunizierten untereinander und stimmten ihre jeweiligen Such-Routen aufeinander ab. „So können sie ein größeres Gebiet im Wechselspiel untereinander absuchen“, erklärt Peter Herzig, Direktor des GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel, wie das IFM-GEOMAR heute heißt.
Meeresboden in 4000 Metern Tiefe auf 20 Zentimeter genau kartiert
Am 14. April 2011 fanden die AUVs das Flugzeugwrack in rund 4000 Meter Meerestiefe auf einer ebenen Stelle des Meeresbodens. Im Rahmen dieser Suche haben die autonomen Unterwasservehikel insgesamt mehr als 2000 Quadratkilometer abgesucht, mit einer Genauigkeit von 20 Zentimetern. „Dieser Bereich ist jetzt der am besten kartierte Meeresboden weltweit“, meinte Peter Herzig seinerzeit. „Normalerweise haben wir keine solchen Detailkarten. Jetzt aber sehen wir einzelne Vulkane, Verwerfungen und Sedimente. Abgesehen von dem traurigen Anlass und der Region, in der das Wrack liegt, wird dies vielleicht einmal so etwas wie Wissenschaftspark werden, wo man umfassende Untersuchungen durchführen kann.“
In Kiel jetzt Förderung aus dem PerLe-Fond für Lehrinnovationen
Soviel zum Potential der autonomen Unterwasservehikel. Das AUV-Projekt der Uni Kiel hat jetzt das „Projekt erfolgreiches Lehren und Lernen (PerLe) der Universität Kiel überzeugt und eine Förderung aus dem Fonds für Lehrinnovationen erhalten. Der PerLe-Fond Lehrinnovationen läuft bis 2016 und hat ein jährliches Budget von 100 000 Euro. PerLe wird aus Mitteln des Qualitätspaktes Lehre des Bundesministeriums für Bildung und Forschung gefördert.
„Ich bin sehr erstaunt, wie motiviert die Gruppe ist“, betont Professor Höher das große Engagement seiner Studierenden. „Die Beteiligung an diesem Projekt fördert Soft Skills, wie problemorientiertes und praxisrelevantes Arbeiten, Team-Organisation und Projektmanagement, die nicht in Form einer Frontallehre zu vermitteln sind. Es ist wichtig für Ingenieure, früh mit der Praxisausbildung in Kontakt zu kommen. Das ist, was die Industrie braucht und wir bieten.“
Ein Beitrag von: