Forscher arbeiten an einem Routenplaner für den Mars
Wer den Mars erkunden will, der muss sich orientieren können. Das ist schwierig, denn es gibt keine Flotte von GPS-Satelliten, die den Roten Planeten umkreisen. Stattdessen sollen einmal Funkbojen auf der Marsoberfläche ausgesetzt werden. Eine Software für deren Kommunikation haben Würzburger Informatiker schon entwickelt.

Filmszene: Matt Damon als Mark Watney im Kinofilm "Der Marsianer". Bis ein Mensch wirklich den Mars betreten wird, werden wohl noch einige Jahre vergehen. Aber der Forschungsroboter Curiosity der Nasa treibt sich schon seit 2012 auf dem Roten Planeten herum. Würzburger Informatiker arbeiten aktuell an einer Software, über die Funkbojen einmal auf dem Mars kommunizieren sollen. So soll ein Ortungssystem aufgebaut werden, dass ähnlich GPS Daten liefern kann, um Routen zu planen.
Foto: Twentieth Century Fox/dpa
Im Science-Fiction-Film „Der Marsianer“ orientiert sich der auf dem Mars gestrandete Raumfahrer Mark Watney bei seiner Odyssee über die staubige Oberfläche des roten Planeten bis zum Schiparelli-Krater anhand von Karten. Diese haben viele Lücken, denn die Kartierung der Marsoberfläche ist ziemlich ungenau. Auch in der Realität. Das soll sich ändern. Forscher haben begonnen, ein funkbasiertes „GPS“-System für den Mars zu entwickeln.
Valles Marineris besonders interessant
Das ist die Idee: Ein ganzer Schwarm von Drohnen, Rovern und Laufrobotern soll nach den Planungen des Deutschen Zentrums für Luft- und Raumfahrt (DLR) in einer fernen Zukunft im Schluchtensystem des Valles Marineris ausgesetzt werden, um dieses zu erkunden. Das Valles Marineris ist rund 4000 km lang, bis zu 600 km breit und stellenweise sagenhafte sieben Kilometer tief. Salzwasser-Rinnsale an den Canyon-Wänden deuten darauf hin, dass dieses Schluchtensystem ein geeigneter Ort für die Suche nach Leben auf dem Mars sein könnte.
Korrekte Orientierung ist Pflicht
In einer Schlucht auf dem Mars ist eine korrekte Orientierung Pflicht. „Wenn beispielsweise eine fliegende Drohne aus der Luft eine interessante Struktur entdeckt hat, bei der es sich lohnen könnte, eine Bodenprobe zu entnehmen, muss sie dem entsprechenden Roboter den exakten Ort mitteilen können“, erklärt Sergio Montenegro von der Universität Würzburg.
Talsystem der Valles Marineris: Dieser bis zu elf Kilometer tiefe und bis zu 200 km breite Grabenbruch erstreckt sich über fast 4000 km Ost-West-Richtung entlang des Äquators durch das Marshochland. Zum Vergleich: Der Grand Canyon in den USA ist nur knapp zwei Kilometer tief und würde leicht in eines der parallel verlaufenden Seitentäler passen.
Quelle: ESA/DLR/FU Berlin
„Auf der Erde liefern uns GPS-Satelliten die notwendigen Informationen“. Auf dem Mars gibt es ein solches Satellitennetz nicht. Es muss erst ein Ortungssystem entwickelt werden. Dafür soll ein Mars-Lander bei seinem Anflug auf die Valles Marineris eine große Menge von Funkbojen abwerfen, die sich über die Oberfläche des Canyons verteilen.
Lander wird zum inneren Bezugssystem
Und das ist der Trick: Die Funkbojen ermitteln ihre jeweilige Position bezogen auf den Standort des Landers, der damit zum inneren Bezugssystem wird. Die Funkbojen kommunizieren alle untereinander und liefern dann den Erkundungsrobotern die für die Navigation und Ortung nötigen Daten. Sie simulieren damit die GPS-Satelliten, die um die Erde kreisen. Das Riesenproblem dabei sind die geringen Entfernungen der Funkbojen vom Lander.
Es kommt auf Nanosekunden an
Für die Positionsbestimmung wird die Laufzeit des Funksignals zwischen Lander und Funkboje gemessen. Und dabei kommt es auf Nanosekunden an. Ein Messfehler von einer tausendstel Sekunde bedeutet in diesem Messsystem bereits eine Abweichung von 300 km.
Der Marsrover Curiosity erkundet bereits seit 2012 den Roten Planeten.
Quelle: Nasa
Das ist schon kompliziert genug. Die unterschiedlich hohen Standorte im Canyon, die Gesteinsstrukturen, die den Funksignalen den Weg versperren, und Reflexionen an den Talwänden verkomplizieren die Messung zusätzlich.



Auch gut für die Unterwasserforschung
Die Aufgabe der Würzburger Forscher ist nun, das System in den kommenden drei Jahren bis zur grundsätzlichen Funktionsfähigkeit zu entwickeln. Die Forscher gehen äußerst systematisch vor. „Wir lassen zunächst zwei Objekte in Ruhe ihren Abstand messen“, berichtet Montenegro. Wenn das mit der erforderlichen Messgenauigkeit funktioniert, wollen die Forscher die Anzahl der Funkbojen erhöhen.
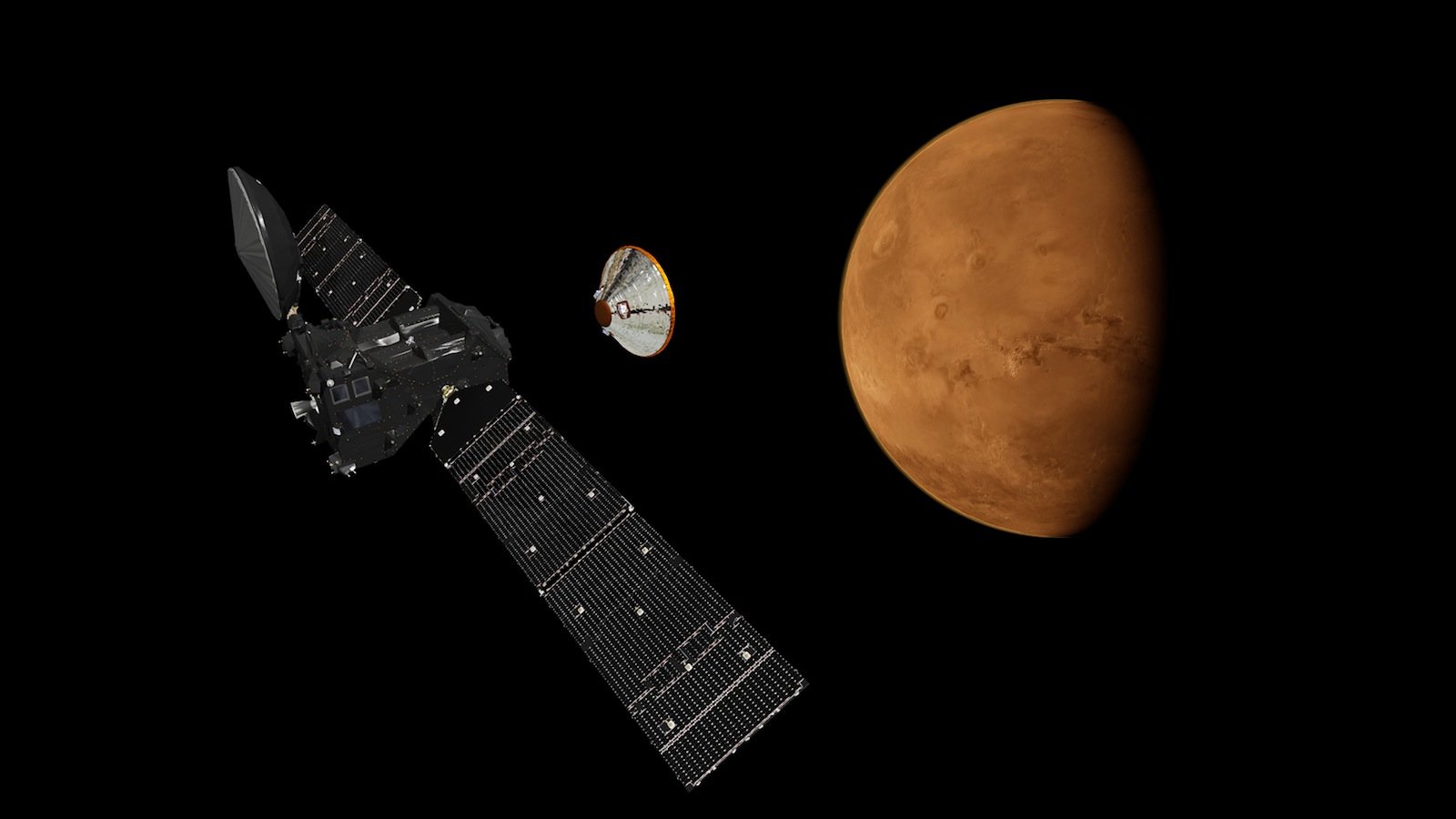
Am 14. März 2016 öffnet sich das Startfenster für die europäische Marsmission ExoMars, bei der eine Raumsonde und der Lander Schiaparelli zum Mars gebracht werden sollen. Schiaparelli ist ein Eintritts-, Abstiegs- und Landedemonstrator, der zeigen soll, dass eine kontrollierte Landung auf der Marsoberfläche möglich ist. Mit ihm sollen Schlüsseltechnologien für weitere Marsmissionen getestet werden.
Quelle: ESA
Im letzten Schritt sollen sich die Funkbojen dann auch noch bewegen. Der Informatiker zweifelt keine Sekunde am Sinn seiner Arbeit, auch wenn ein echter Einsatz auf dem Mars ungewiss ist. „Wir können das System genauso gut für die Unterwasserforschung einsetzen“, erklärt Montenegro. Denn auch dort gibt es noch riesige Lücken in den Karten.
Ein Beitrag von: