Neues Meerwasserbecken als Teststand für Tauchroboter
In einem riesigen Meerwasserbecken im Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI) in Bremen werden jetzt Tauchroboter getestet. Sie sollen in Zukunft Schiffe und Pipelines untersuchen, unbekannte Gewässer erforschen oder Offshore-Anlagen reparieren.

DFKI-Forscher steuern das Unterwasserfahrzeug Seabotix durch das Testbecken. Dort macht es Filmaufnahmen, die live in das Virtual Reality Labor – eine 3D-Testumgebung – übertragen werden.
Foto: DFKI GmbH/Annemarie Hirth
Das Becken sieht zwar aus wie ein großes Schwimmbad, ist aber acht Meter tief und mit 3,4 Millionen Liter Salzwasser gefüllt. Der Blick ins Becken zeigt die Nachbildung einer Pipeline, einer Felsenhöhle und den Modellnachbau des Fundaments einer Windkraft-Anlage. Das ist die Testlandschaft für die Tauchroboter. Hier sollen sie lernen, sich zu orientieren und ihre Aufgaben selbstständig zu erfüllen, beispielsweise bei einer Ölbohrstation auf dem Meeresboden ein Unterwasserventil zu schließen.
Im Echtbetrieb ohne Fernsteuerung
Das alles passiert später im Echtbetrieb ohne Fernsteuerung durch einen Menschen, deshalb ist der Testbetrieb für die Roboter wichtig. „Testläufe sind von der Witterung unabhängig, kontrollier- und beobachtbar, und trotzdem realitätsnah“, erläuterte Frank Kirchner, Leiter des DFKI Robotics Innovation Center. Das Becken schaffe deshalb die idealen Forschungsbedingungen.

3,4 Millionen Liter Salzwasser fasst das neue Testbecken für Robotik-Forschung, das jetzt im Neubau des Deutschen Forschungszentrums für Künstliche Intelligenz in Bremen eröffnet wurde.
Quelle: DFKI GmbH/Annemarie Hirth
„Wir müssen erst mal wissen, dass unsere Systeme sicher sind“, sagt Kirchner. Sie sollen in den nächsten fünf Jahren auf den Markt kommen, die Nachfrage ist bereits jetzt groß. Der Meeresboden beherbergt bereits seit vielen Jahren Tausende von Kilometern Pipelines und Seekabel, Pumpen und Leitungen der Öl- und Gas-Förderanlagen. Außerdem werden zunehmend mehr Offshore-Windkraftanlagen auf hoher See gebaut. Kontrollen und Reparaturen sind derzeit noch sehr aufwändig. Sie kosteten viel Geld, teilweise seien sie noch gar nicht möglich, so Kirchner.
Roboter machen Wartung oft erst möglich
Mit Hilfe der neuen Anlage werden am DFKI Roboter entwickelt, die eine kostengünstige Wartung und Inspektion erlauben sowie mancherorts überhaupt erst ermöglichen. Avalon ist einer davon: Er fährt Pipelines auch in der Tiefsee autonom ab und spürt mit Sensoren Unterspülungen oder Sandablagerungen auf.
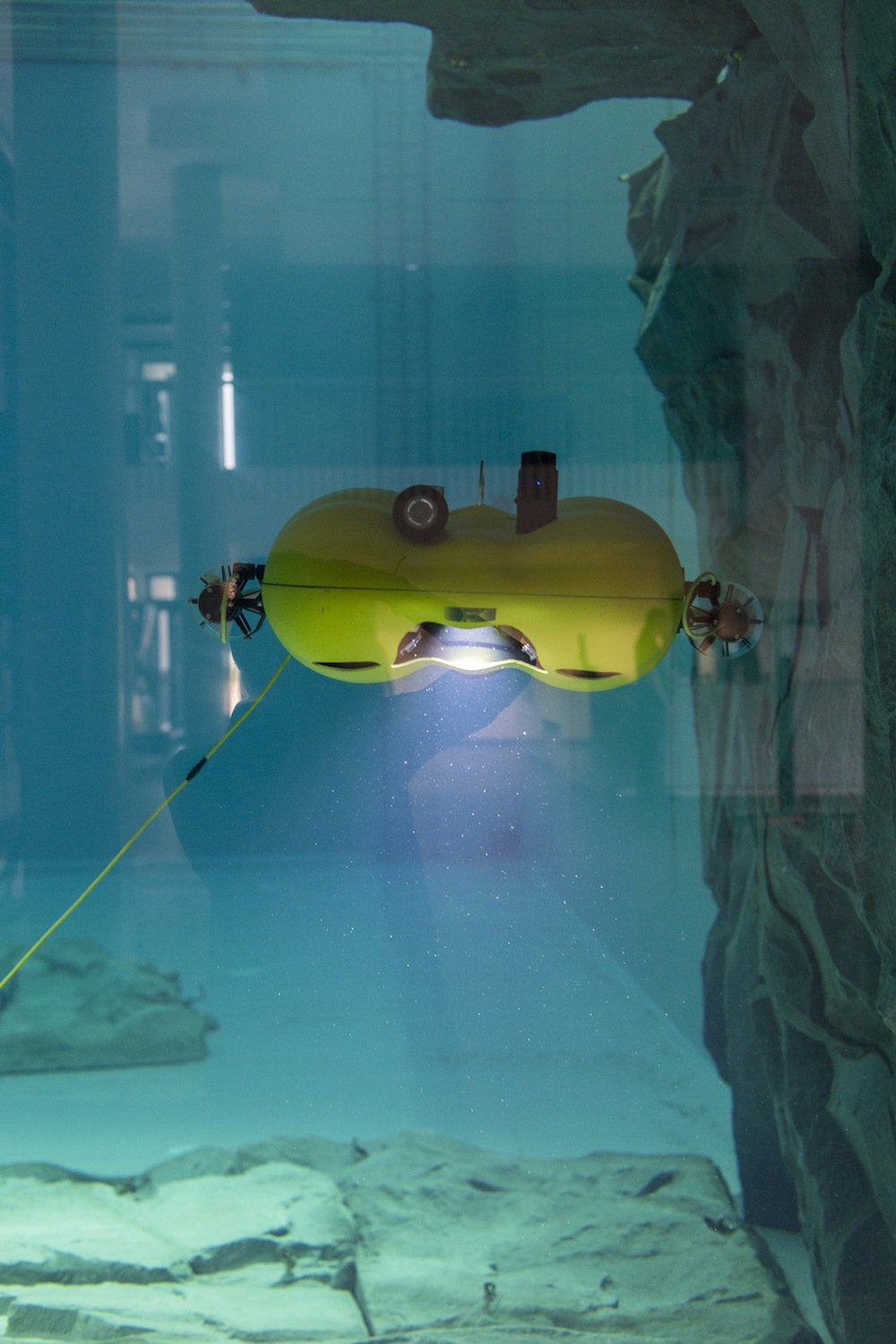
Das autonome Unterwasserfahrzeug Dagon wird für eine Testfahrt zu Wasser gelassen.
Quelle: DFKI GmbH/Annemarie Hirth
Entwickelt wurde auch eine Tiefseehand mit drei Fingern. Diese seien mit je 800 Sensor-Druckpunkten ausgestattet, sagte Kirchner. „Wir wollen damit im Tiefseebereich Objekte tasten und befühlen.“ Auch die Manganknollen-Ernte im Pazifik sei mit Hilfe der neuen Technologie in absehbarer Zeit denkbar, meint Kirchner. Damit ließen sich Rohstoffe invasiv abbauen, und der Meeresboden würde nicht mehr zerstört als unbedingt nötig.
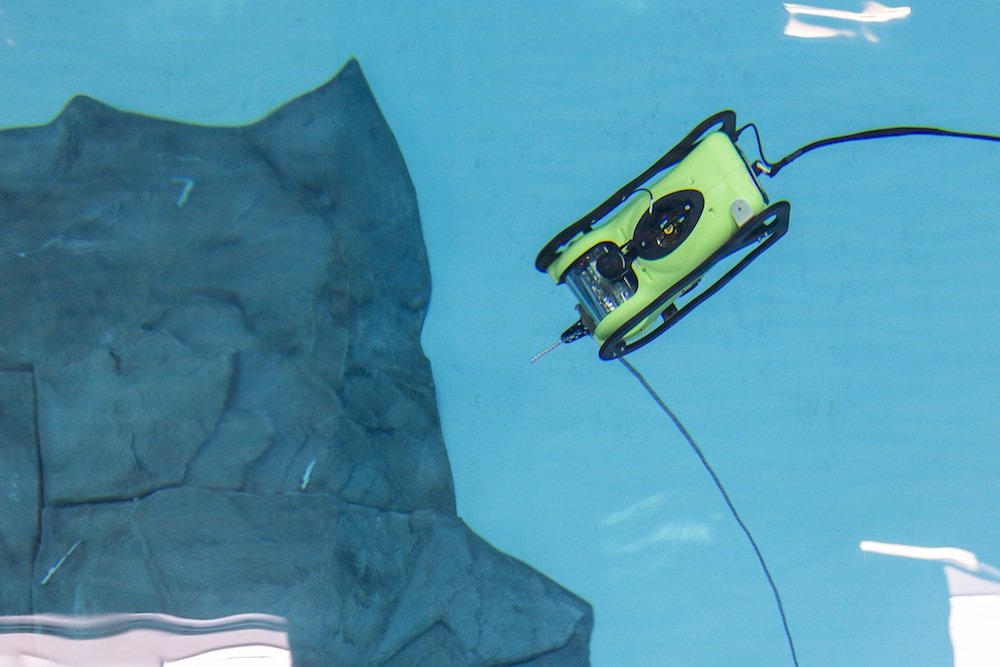
DFKI-Forscher steuern das Unterwasserfahrzeug Seabotix durch das Testbecken. Dort macht es Filmaufnahmen, die live in das Virtual Reality Labor – eine 3D-Testumgebung – übertragen werden.
Quelle: DFKI GmbH/Annemarie Hirth



Das Testbecken in Bremen wird ergänzt von weiteren Laboren wie einer Druckkammer, in der Komponenten bei einem Wasserdruck von bis zu 6000 Metern Tiefe geprüft werden, und einer virtuellen 3D-Testumgebung. Laut Kirchner sollen im nächsten Jahr die ersten Roboter auf See getestet werden – in der Ostsee am künstlichen Riff vor Rügen und an Offshore-Anlagen vor Brasilien.
Ein Beitrag von: